
TA7291P を使った小型モータ駆動回路
TA7291Pを使った小型モータ駆動回路
■モータの正転/逆転を制御するには?
一般的な DC ブラシ・モータ(以下,単にモータ)は,乾電池などの電源をつなぐと一定方向に回転し ます.逆に回転させたい場合は,電源の極性を逆にします.この切り替え動作を行うための回路が,図1に示す H ブリッジ回路です.
図1(a)のように,どのスイッチもONしていないときは,モータは回転しません.図1(b)のようにSW1 とSW4 をONすると,矢印のように電流が流れ,モータが回転します.また図1(c)のように,SW2 とSW3 をONにすると,図1(b)のときとは逆に電流が流れて,モータが逆方向に回転します.
ただし,図のとおりに単なるスイッチを使ってしまうと,人間が手で操作するなど機械的な動作が必 要になってしまいます.実際には,スイッチの部分にはリレーや,トランジスタ/FETなどの半導体を
使用して電気的に操作します.
![]()
図 1 モータの正逆転を切り替える H ブリッジ回路
■モータ駆動の専用デバイス…モータ・ドライバIC
Hブリッジ回路を作る場合,おおまかに三つの方法があります.表1は,それぞれの場合で扱える電流の大きさや,製作のしやすさを比較したものです.大電流が必要なラジコン用のモータなどの場合は,ディスクリートで組むのが良いでしょう.定格電流がおおむね1A以下の模型用小型モータや,産業用の小型モータなら,専用のモータ・ドライバICが利用できます.
表 1 H ブリッジ回路の構成方法と特徴
回路構成 |
トランジスタやMOSFETなど |
トランジスタ/MOSFET |
専用モータ・ドライバを |
|
ディスクリート部品を使う場合 |
アレイを使う場合 |
使う場合 |
||
|
||||
部品点数 |
多い |
ディスクリートよりは少ない |
少ない |
|
|
|
|
|
|
製作のしやすさ |
難しい |
ディスクリートよりは簡単 |
簡単 |
|
|
|
|
|
|
扱える電流の大きさ |
数十Aまで |
5A程度まで |
3A程度まで |
|
|
|
|
|
|
駆動可能なモータ |
大電流が必要なラジコン用の |
模型用や産業用の小型モータ |
模型用や産業用の小型モータ |
|
モータなど |
など |
など |
||
|
||||
|
|
|
|
|
|
使用するデバイスや構成に |
トランジスタ/MOSFETの部分 |
入力信号の処理や出力段のト |
|
|
よって数百mA~数十Aまで幅 |
がIC1個になるので,回路規 |
ランジスタ/MOSFETがIC1個 |
|
利点 |
広い電流を扱える.損失が小 |
模を小さくできる.専用モータ・ |
に収まっているので,回路規 |
|
|
さく高効率で,細かな制御も可 |
ドライバよりも,扱える電流が |
模がとても小さい.多くの製品 |
|
|
能な回路を構成できる. |
大きめ. |
はマイコンなどと直結できる. |
|
|
|
|
|
|
|
部品点数が多く製作が難し |
デバイスの選択肢が多くなく, |
電流容量が小さいものが多 |
|
欠点 |
い.個々のデバイスに対する |
性能が頭打ちになる. |
く,出力が大きなモータを駆動 |
|
|
知識が必要. |
|
できない. |
|
|
|
|
|
■代表的なモータ・ドライバ IC
代表的なモータ・ドライバ IC の主な特性を表2に示します.モータの定格電圧/電流などから,必要 なデバイスを選びます.
TA7291P(写真 1 左)は平均電流 1A(ピーク 2A)と小容量ですが,ロジック側電源電圧(VCC)が 4.5V からで,マイコンなどと組み合わせやすいのが利点です.出力側電源電圧も 0V からなので,乾電池 2~3 本で駆動するのに適しています.また,TA8429HQ(写真1 右)は平均電流が 3A と大きく,TA7291P よ りも大きめのモータを駆動できます.ただし,ピン・ピッチが特殊なためユニバーサル基板に実装しづらく,VCC が 7V からなので高めの回路電源が必要です.
|
|
表 2 |
代表的なモータ・ドライバ IC の特性 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
ロジック側 |
出力側 |
出力電流 |
許容損失 |
|
型名 |
メーカ |
回路数 |
|
電源(VCC ) |
電源 |
(平均/ピーク) |
パッケージ |
|
|
|
|
|
[V] |
(VS )[V] |
[A] |
[W] |
|
|
|
|
|
|
|
|||
TA7279P |
東芝 |
2 |
|
6~18 |
0~16 |
1.0/3.0 |
2.3(注1) |
HDIP14 |
TA7291P |
東芝 |
1 |
|
4.5~20 |
0~20 |
1.0/2.0 |
12.5(注2) |
HSIP10 |
TA7291SG |
東芝 |
1 |
|
4.5~20 |
0~20 |
0.4/1.2 |
0.95(注1) |
SIP9 |
TA8051PQ |
東芝 |
1 |
|
6~16 |
6~16 |
3.0/- |
25(注2) |
HZIP12 |
TA8428K(S) |
東芝 |
1 |
|
7~27 |
ロジックと共通 |
1.5/3.0 |
10(注3) |
HSIP7 |
TA8429HQ |
東芝 |
1 |
|
7~27 |
0~27 |
3.0/4.5 |
21.6(注3) |
HZIP12 |
TA8440HQ |
東芝 |
1 |
|
~7 |
~50 |
1.5/3.0 |
25(注4) |
HZIP12 |
(注1)IC単体での値 (注2)TC =25℃での値 (注3)TC =85℃での値 (注4)TC =75℃での値
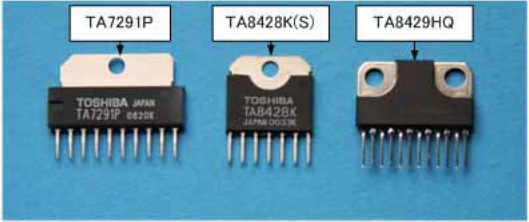
写真 1 モータ・ドライバ IC の外観
■タミヤのダブルギヤボックスを駆動する回路を作る
今回は,写真2 に示すタミヤのダブルギヤボックス(左右独立 4 速タイプ)を駆動する回路を製作して みます.この製品は,その名のとおり二つのギヤ・ボックスが一体になったもので,左右に出ている軸 を個別に回転できます.自走ロボットの車輪部分に適しており,ギヤ比も 4 種類から選んで組み立てら れるので,スピードが必要な場合や力(トルク)が必要な場合のどちらにも対応できます.
表 3 |
|
|||
|
|
|
|
|
項目 |
|
値 |
単位 |
|
動作電圧範囲 |
1.5~3.0 |
V |
||
適正電圧 |
1.5 |
V |
||
無負荷時 |
|
回転数 |
9100 |
rpm |
|
消費電流 |
0.20 |
A |
|
|
|
|||
|
|
回転数 |
6990 |
rpm |
|
|
消費電流 |
0.66 |
A |
最大効率時 |
|
トルク |
0.59 |
mN・m |
|
|
6.0 |
g・cm |
|
|
|
|
||
|
|
出力 |
0.43 |
W |
|
|
トルク |
2.55 |
mN・m |
ストール時 |
|
26 |
g・cm |
|
|
|
|||
|
|
消費電流 |
2.20 |
A |

写真 2 ダブルギヤボックスの外観
実際に製作した回路の回路図を図2に,外観を写真3に,部品表を表4に示します.モータを二つ駆動できるよう,1 枚の基板に二つのモータ・ドライバを実装します.また,回路が小さいのでユニバーサル基板
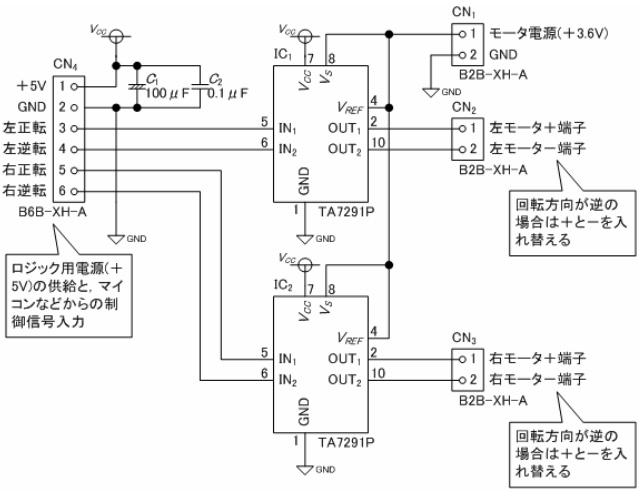
図 2 製作したモータ駆動回路の回路図
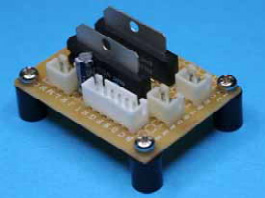
(a)外観
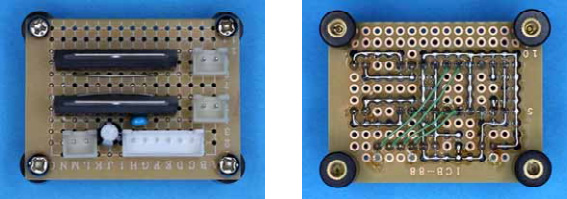
(b)部品面のようす |
|
|
(c)はんだ面のようす |
||
写真 3 |
製作したモータ駆動回路の外観 |
|
|||
表 4 |
|
製作したモータ駆動回路の部品表 |
|
||
|
|
|
|
|
|
品名 |
|
メーカ |
型名/容量など |
個数 |
参照番号 |
モータ・ドライバIC |
|
東芝 |
TA7291P |
2 |
IC1,IC2 |
ユニバーサル基板 |
|
サンハヤト |
1 |
- |
|
コネクタ・ポスト(2ピン) |
|
日圧 |
3 |
CN1,CN2,CN3 |
|
コネクタ・ポスト(6ピン) |
|
日圧 |
1 |
CN4 |
|
コネクタ・ハウジング(2ピン) |
|
日圧 |
3 |
CN1,CN2,CN3 |
|
コネクタ・ハウジング(6ピン) |
|
日圧 |
1 |
CN4 |
|
コネクタ・コンタクト |
|
日圧 |
12 |
CN1,CN2,CN3,CN4 |
|
電解コンデンサ |
|
各社 |
100μF/25V |
1 |
C1 |
積層セラミック・コンデンサ |
|
各社 |
0.1μF/50V |
1 |
C2 |
ETFE線 |
|
潤工社 |
φ0.26mm(AWG30) |
少々 |
|
スペーサ |
テイシン電機 |
4 |
(必須ではない) |
||
電池ケース(単三×3本) |
|
Linkman |
BH331B |
1 |
(必須ではない) |
電池用スナップ |
|
Linkman |
006PI |
1 |
(必須ではない) |
■製作した回路を動かす
●モータ用の電源電圧は少し高めにする
トランジスタや MOSFET で H ブリッジ回路を構成した場合,図1で示した各スイッチ部分で電圧降下が生じます.TA7291P の場合,その値はおおむね 1V 程度です.電源の+端子からモータを経由して-端子に至るまで,スイッチ 2 個を通るので,全部で 2V 程度の電圧降下が生じます.モータの適正電圧は 1.5V なので,電圧降下分を足して 3.5V 程度の電源が必要です.三洋のエネループなどに代表されるニッケル水素 2 次電池なら,出力電圧が 1.2V なので,3 本でちょうど良い電圧になります.
●モータの回転方向はマイコンなどから出力する 0~5V のパルス信号で制御する
表5は,TA7291P の制御信号入力と出力の関係です.入力側の H レベルは 3.5~5V,L レベルは 0V とします.5V 動作のマイコンなら,信号をそのまま TA7291P に与えることができます.IN1 と IN2 が共に H レベルの場合,OUT1 と OUT2 どちらも L レベルとなり,モータにブレーキをかけることができます.
表 5 TA7291P の制御信号入力と出力の関係
|
入力 |
出力 |
動作 |
||
|
|
|
|
|
|
IN1 |
|
IN2 |
OUT1 |
OUT2 |
|
|
|
||||
L |
|
L |
Z |
Z |
停止(フリー) |
|
|
|
|
|
|
H |
|
L |
H |
L |
正転(または逆転) |
|
|
|
|
|
|
L |
|
H |
L |
H |
逆転(または正転) |
|
|
|
|
|
|
H |
|
H |
L |
L |
ブレーキ |
|
|
|
|
|
|
(注)Zはハイ・インピーダンス.出力側電源の +にも-にも繋がっていない状態
写真4は,8 ビット・ワンチップ・マイコンの
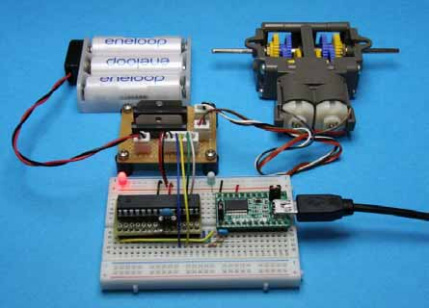
写真 4 ワンチップ・マイコンでモータの回転を制御しているようす
●回転速度を制御したいときは制御信号の幅を変える…PWM 制御
カーブをなめらかに回るといったように,モータの回転数を自由に可変したい場合には,モータの ON と OFF を高速に切り替える PWM 制御を行います.具体的には,図3のような信号を加えます.IN1 を図3(a)のように変化させ,IN2 を“L”で固定すると,モータは一定間隔で正転と停止を繰り返します.正転と停止の切り替えが十分に早ければ,モータは一定速度で回転しているように見えます.
図3(a)のように“H”の幅と“L”の幅を同じにすると,モータの回転数は半分になります.“H”と “L”の幅の比をデューティ比と呼びます.図3(b)のように“H”の幅を長く,“L”の幅を短くすれば 回転が速く,逆に図 3(c)のように“H”を短く,“L”を長くすれば回転が遅くなります.
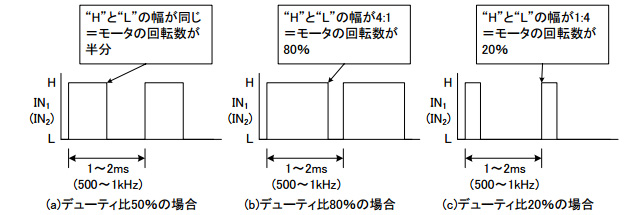
図 3 モータの回転数を変化させる PWM 制御信号
マイコンには,このような PWM 信号を生成するための機能を備えたものがあり,先ほど実験に使用した ATmega168 には PWM 出力が 6 本あります.PWM 出力が 4 本あれば,二つの TA7291P に対して IN1/IN2 個別に PWM 信号を与えることができ,回路を簡素化できます.PWM が 2 本しかない場合は,図4のようなロジック回路を追加するなどして,IN1/IN2 それぞれを PWM 制御するような工夫が必要です.
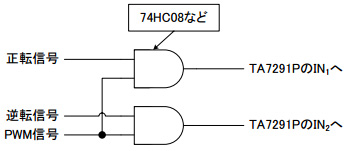
図 4 1 本の PWM 信号を IN1/IN2 に分配する回路