���{�b�g�̊�{�I�Ȃ����݁@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@

���{�b�g�Ƃ����āC�F����͉����v�����ׂ�ł��傤���B�}���K�ł���h���������S�r�A�g���Ȃǂ��C���݂���ŋ߂̃��{�b�g�ł���z���_��ASIMO��\�j�[��AIBO�Ȃǂ���������l���������Ǝv���܂��B
�{���Ɏ������邩�ǂ����͕ʂɂ��Ă��C�u�l�⓮���Ɠ����悤���l���E�����C�ł���Η͎����̓����҂ŁC�l�̑���Ɏd���������I�ɂ���Ă������v�C���ꂪ���ɂ̃��{�b�g���Ƃ����܂��傤�B
ASIMO��AIBO�͂��̔��W�r��ɂ���C���̃��{�b�g���������I�Ɏ����ł��Ă�����̂Ƃ����܂��B���ꂩ�烍�{�b�g�̎d�g�݂ɂ��Đ������Ă����܂����C���{�b�g���̂��̂��l����O�ɁC���̖ڕW�ƂȂ�l�̓�����l�����ɂ��Ă݂Ă����܂��傤�B
���u�l�Ԃ̓����v��ڕW�ɂ���@�`A����̎�����
A����͖������݂��������܂��B���ʑ�̑O�ɗ����Ă����A����̓����ǂ������Ă݂܂��B
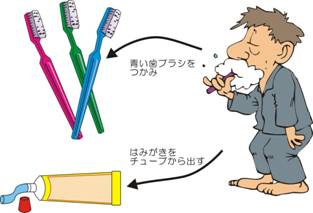
�}1.A����݂̂͂���
�@�܂��C�Ƒ��̎��u���V�̒����玩���̐����u���V�������Ď�Ɉ���܂��B
�A���ꂩ�玕�݂����`���[�u�̃L���b�v���͂����C�u���V�Ɏ��݂�����K�ʂ��Č����֎����Ă����܂��B
�ȏ�̓���́C�Q�ڂ��Ȃ�����قƂ�ǖ��ӎ��ɂł���C�l�ԂɂƂ��Ă͂��₷�������ł��B�ł́A��������{�b�g�ɂ����Ă݂܂��傤�B�ǂ̂悤�Ȕ��f��@�\���K�v�ɂȂ�ł��傤���B
���{�b�g��A����Ɠ����s�������邽�߂ɂ́C�͂��߂ɁC���������u���V�������Ȃ���Ȃ�܂����B
���̂��߂ɂ̓��{�b�g�ɉf���f�ł���J�����̋@�\�i���o�j���K�v�ɂȂ�܂��i�}2�j�B�J�����ɂ���āC���u���V�̌`�ƐF���������܂��B

�}2�@���{�b�g�ɂ�鎩���̎��u���V�F���ƍs���i���ށj
���̂����u���V�̌`�����Ă��āC�F���ł���C���̕����ɘr��L���C��Ŏ��u���V�����݂܂��B���̂��߂ɂ́C�r��w����т��̊߂̋@�\��p�ӂ��āC���������ɓ������āC�������ʒu�Ɨ͂Ŏ��u���V���ɂ���Ȃ�����Ȃ�܂���B
�����悤�ɁC���݂����`���[�u�̌`�����o���C�����Е��̎�ł���𐳂�������ŁC�`���[�u����K�ʂ������݂������u���V�ɉ����o���K�v������܂��B
�}3�ɁC�Z�K�g�C�Y����10�N���O�ɔ������ꂽ��̖͌^�u�|��i�Q�[�e�j�v�������܂��B���ۂ̐l�Ԃ̎�̂����݂��͂����ƒP���ł����C�悭�ł����͌^�Ŋ߂�14����܂��B���y�ɍ��킹�Ďw�������܂����c�O�Ȃ��瓮���͒P���ŁC���u���V�����߂�悤�Ȃ��̂ł͂���܂���B
���u���V�����ނ��߂ɂ́C�u�|��v���x�̎�ł����[�^�Ȃ�14�̊߂����d�g�݂Ƃ�����R���g���[������R���s���[�^��p�ӂ���K�v������܂��B14�̂��̂��ɍl���������̂͂����ւ�ł����C�l�Ԃ͂�������Ƃ��ȒP�ɂ��Ȃ��Ă��܂��B

�}3�@��̖͌^�u�|��i�Q�[�e�j�v�i14�̊߂���\���j
���͂̉��������
���u���V�����邽�߂ɂ́C�߂̋@�\�����ł͏\���ł͂���܂���B�u���V�𗎂Ƃ����C���n���͂ŕ����Ȃ��悤�ɓK�x�ȗ͂ň���K�v������܂��B
�`���[�u�̕��͂Ȃ�����ł��B�`���[�u���������肷����ƒ��g���݂�Ȕ�яo�Ă��܂����C�K���ȗ͂ł�����Â���Β��g���ǂ�ǂ�o�Ă��܂��̂ŁC�K�ʂɂȂ�����͂��ɂ߂�悤�ȑ��삪�K�v�ɂȂ�܂��B
�l�̎�ɂ͐G�_�i�܂��͈��_�j�Ƃ���͂�������ꏊ�����炠��C����ɂ���ɉ�����͂�����ɒ������Ă��܂��i�}4���j�B���{�b�g�̎�ɂ͂���قǂ̐��͕K�v�Ȃ���������܂��C�l�Ԃ̎�Ɠ����悤�Ɋe�w�Ɉ��͂�������d�g�݂�p�ӂ��C��������̐M���Ŋ߂̓������R���g���[�����Ȃ���Ȃ�܂���B
�}4�E�ɂ��L�@�g�����W�X�^�ł�ꂽ���̓Z���T�������Ă���܂��B��̍\���ɍ����悤�ɏ_�炩���C�܂�1��1���������ł��Ă��܂����C�l�Ԃ̐G�_�ɂ���ׂ�Ƃ܂��܂���^�ŁC���������Ə��Ȃ��ł��B
���̂悤�ɁC�l�Ԃ��قƂ�ǖ��ӎ��ɍs���Ă��铮������{�b�g�ɂ����悤�Ǝv���ƁC���܂��܂ȋ@�\�Ƃ�����R���g���[������d�g�݁E���߂��K�v�ɂȂ�ȒP�ɂ͎����ł������ɂȂ����Ƃ��킩�邩�Ǝv���܂��B
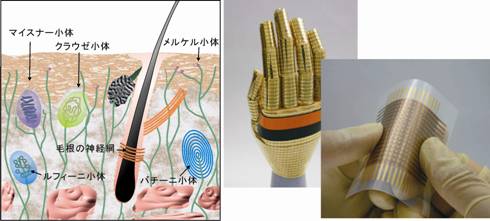
�}4 �畆�ɂ���͂�������G�_�i���}�j�Ƃ����͂����L�@�g�����W�X�^������ꂽ���̓Z���T�i�E�}�j
�����܂Ő������܂������{�b�g�̎��݂����̎d�g�݂��܂Ƃ߂Ă݂܂��傤�B
�y�K�v�ȑ��u�z
�i�P�j�Z���T�n
�F���ӂ��݂鑕�u�i�J�����j
�F���Ƃ��̗͂𑪂鑕�u�i���̓Z���T�j
�i�Q�j����n
�F���̌`�E�F�E�͂Ȃǂf���鑕�u�i�R���s���[�^�j
�i�R�j�쓮�n
�F�r�Ǝ�ȂǁC�������ޑ��u�i�A�[���E���[�^�j
�y�K�v�ȋ@�\�z
�i�P�j���́i���u���V�E���݂����`���[�u�j���T��
�u�T���v�́A�u�݂�v�u���f�v�u����v�̎O�̋@�\����\������Ă��܂��B
���݂��F�J�����Ŏ��ӂ��݂�B
�����f�F�J�����̃f�[�^�ׂāC�ΏۂƂȂ���̂ƁC�`�E�F����v���邩�ǂ����f���C�r��w�ɖ��߂𑗂�B���K�v�ȃf�[�^�́A���u���V�̌`�C���݂����`���[�u�Ȃǂ̌`��C�C�ԂȂǂ̊�{�ȐF
�������F���f����v������Ώۂ̂��̂̕����֘r��L�����ށB
�i�Q�j ���́i���u���V�E�݂͂����`���[�u�j�������グ��
�u�����グ��v�́A�u�G��v�u���f�v�u����v�̎O�̋@�\����\������܂��B
���G���F�w�Ŏ��u���V�̕���`���[�u�ɐG��C���ޗ͂𑪂�B
�����f�F���ޗ͂��K�����ǂ����f���C�w�E�r�ɖ��߂𑗂�B
���K�v�ȃf�[�^�|�u���V�̕���`���[�u�����ނ̂ɓK���ȗ́i���́j
�������F���f�ɉ����Ďw�̗͂����߂����߂��肵�Ȃ���r�ł��̂������グ��B
���l�ɁC�J�����ƈ��̓Z���T�C�r��w�̋@�\�ƃR���s���[�^������C�`���[�u���玕�݂������o���Ȃǂ̓���͂ł������ł����C���G�ȓ���ɂȂ�Ȃ�قǂ������������̂͗e�Ղł͂���܂���B
�܂��C�Ⴆ�C�N����������������āC���݂����`���[�u�̑���Ɍ`���F�������悤�ȗ���킳�у`���[�u��u�����Ƃ��܂��傤�B�l�Ԃł�����C���Ƀu���V������O�ɁC�킳�ѓ��L�̂�Ƃ���ɂ����ŁC���邢�͌��ɓ���Ă���ł��C�킳�тƎ��݂����̖��̈Ⴂ�͂����ɂ킩��ł��傤�B�������C�ɂ�������������C�����������肷��d�g�݂̂Ȃ����{�b�g�ł́C���̂܂��݂����𑱂��邵������܂���B���������邽�߂ɁC���{�b�g�ɂ͍X�Ɏ��̂悤�Ȏd�g�݂��K�v�ƂȂ�܂��B
�i�R�j�ɂ����f����
�ɂ����f����ɂ́A���̎O�̋@�\���K�v�ł��B
�������F�ɂ����Z���T�����݂����ɋ߂Â��ɂ����𑪂�B
�����f�F�ɂ��������݂���������Ƃ����̂��̂��f����B
�������F�ɂ��������݂����ł���Ύ��݂�������𑱂���B�����łȂ���Ύ��݂������~����B
�ȏ�̂悤�ɁC�l�Ԃ́C���퐶���̒��ŐF�C�ɂ����C�͂ȂǗl�X�ȏ����O�����������C����Ɋ�Â��Ĕ��f���s���C���̓�������߂Ă��܂��B���݂̃��{�b�g�͂��̂ق�̈ꈬ��̕������ł��邾���Ȃ̂ł��B
���܂ŐG��Ă��Ȃ������u���{�b�g�Ƃ͉����낤�v�ɂ��čl���܂��B
���̓��{�b�g�ɂ��Ė��m�Ȓ�`�͂���܂���B�����Ȃ����{�b�g�l�`�ł��K���_���ł����������{�b�g�Ǝv�������̂͂��ׂă��{�b�g�ƌĂ�ł��܂�Ȃ��̂ł��B�ł����C�����ł͎��̂悤�ɍl���܂��傤�B
����܂ł݂Ă�������@�|�B�͐}5�̂悤��3�̋��ʓ����Ƃ��Ă܂Ƃ߂邱�Ƃ��ł��܂��B�l�Ԃ̓���̂قƂ�ǂ͂���3�ɂȂ��炦�邱�Ƃ��ł��܂��B
�����ŁC�u�����v�u�l���v�u�����v���Ƃ��s���\�͂�������Ă��āC�l�Ԃ̂悤�ɑ����̂��Ƃ͂ł��Ȃ��Ă��C1�ł��܂Ƃ܂������삪�ł�����̂ł���C��������{�b�g�ƌĂт܂��傤�B���{�b�g�́C�O������̏����Z���T�Łu�����āv�C���̏��ɂ�莟�̍s�����u���f���v�C���[�^�Ȃǂ��u�������v�C����3������������̂Ƃ����܂��i��������{�b�g3�����ƌĂԂ��Ƃɂ��܂��j�B�܂��C�O�����������邱�Ƃ���́C���[�^�ȂǂM���𑗂邱�Ƃ��o�͂Ƃ����C���͂���K�ȏo�͂邱�Ƃ��R���s���[�^�̖����ƂȂ�܂��B�܂��C���i�C���C�Ȃ��ڂɂ��Ă���@�B�̂������Ȃ�̂��̂����{�b�g�ł���Ƃ����܂��B
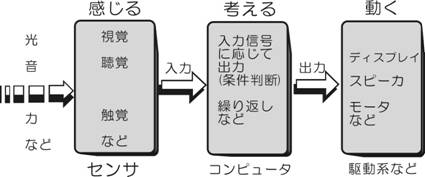
�}5�@���{�b�g�̊�{����i3�����F�����E�l���E�����j
�����ڂ̓��{�b�g�炵���Ȃ��Ă��C���{�b�g3�����i�����C�l���C�����@�\�����������́j�����Ă͂߂čl���Ă݂�ƃ��{�b�g�ƌĂׂ�g�߂ȋ@�B�C���u���������Љ�܂��B
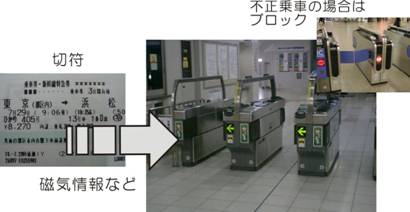
�}6�@�������D�@�i�s����ԊĎ��̉w�����{�b�g�H�j
�@ �������D�@
�@�}6�́C�w�̉��D���ɂ��鎩�����D�@�ł��B��~�q�̓��ꂽ�ؕ��̏��f���āC�s���ȏ�Ԃł�������A�ؕ����Ȃ���~�q�̏ꍇ�́C������ău���b�N������̂ł��B�ؕ��̏��͎��C�Z���T�Ȃǂœǂݎ��C�l���ʂ������ǂ����͐ԊO���œǂݎ���Ă��܂��B�������D�@�̃��{�b�g3�����́C
������F���C�i�ؕ��̏��j�C�ԊO���i�l�̒ʉ߁j�B
�l����F�ؕ������������ǂ����f�B
�����F�s����Ԃł���Δ������C����ł���ΊJ���B
�̂悤�ɕ\�����Ƃ��ł��C�w������̑�������郍�{�b�g�Ƃ����܂��B
�A �G�A�R��
�G�A�R���Ƃ����Η�g�[����ȖړI�ł����B���̖ړI�̂��߂ɉ��x�Z���T���t���Ă��āC�ݒ艷�x��莺��������������Ⴉ�����肷��ƁC�����E������M�����p�R���v���b�T�̉�]���R���g���[�����ēK�ȉ��x�Ɏ�����ۂ��̂ł����B�������C�ŋ߂̃G�A�R���͓�����g�[�ł����Ȃ胍�{�b�g�����Ă��܂��B�Ⴆ�C���x�Z���T�Ƃ����Ă��Z���T�t�߂̉��x�����������镁�ʂ̃Z���T�ł͂Ȃ��C�ԊO����p���ď��̉��x�𑪒肵�ď��t�߂̉��x���œK�ɂ��邱�Ƃ��ł�����C�������ԊO���Z���T�Ől�i�������́j�̈ʒu�����m���āC�l�̂܂��̉��x���œK�����邱�Ƃ��ł���ȂǁC�R���g���[�������x�����Ă��܂��B
�܂��C���x�⎼�x�����łȂ��C����Z���T�C���уZ���T�C��_���Y�f�Z���T�ȂNJe��Z���T�������Ă��āC����炪��l����ƑΉ������C���u�������悤�ɂȂ��Ă��܂��B�܂��ɃG�A�[�R���f�B�V���i�̖��ɒp���Ȃ����̂ƂȂ����܂��B�G�A�R���̃��{�b�g3�����͈ȉ��̂悤�ɂȂ�܂��B
������F�ԊO���i���x�E�l�j�C���x�C����C���сC��_���Y�f���B
�l����F�ꏊ�Ɖ��x�̊W����œK�ȕ����E���������l���鑼�B
�����F�����C�t�@���̉�]�C�R���v���b�T�̉�]�C��C����@�B
�G�A�R�������łȂ��C�g�̂܂��̓d�����i���u�}�C�R�����ځv�Ƃ������Ă�����̂́C�قƂ�ǃ��{�b�g�����Ă���Ƃ����܂��B�d�q�����W�C����@�Ȃǂ̃��{�b�g3�������l���Ă݂�Ƃ悢�ł��傤�B
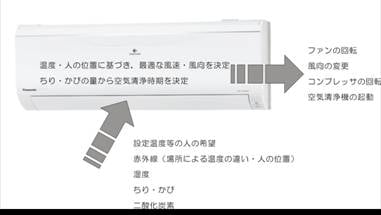
�}7�@�e��Z���T��������G�A�R��
�B �����ǔ��J����
�ŋ߂̃f�W�^���J�����́C�l�̊��F�����Ă��̕����Ƀt�H�[�J�X�����킹�C�I�o�����āC�炪�������ʂ�悤�ȋ@�\�������Ă��܂��B����ł����h�ȃ��{�b�g�Ƃ����܂����C�����ƃ��{�b�g�炵���l�̊��ǂ�������J����������܂��B
�}1.1.9��Qca��Orbit�i���W�N�[���Ёj�Ƃ����C���^�[�l�b�g�p�̃J�����ł��B�J�����ŕ߂炦���f�W�^���摜�̂����C�l�̊�Ǝv���镔����F�����܂��B���̕������ړ�����ƃJ���������̓����ɍ��킹�Ď��U��C��Ɋ炪���S�ƂȂ������ۂ��܂��B�����ŏd�v�ɂȂ�̂̓J�����ő������f�[�^�̒������̕�����F�����C����ɓ����ɂ��Ή�����Ƃ����摜�F���̋Z�p�ł��B�������Ă������ȃR���s���[�^�ƃf�[�^�����̋Z�p�̐i���ɂ�菉�߂ĉ\�ɂȂ�܂����B

�}8�@�l�ʒǔ����{�b�gQca��Orbit�i��̓����ɍ��킹�ă����Y�������j
�l�ʒǔ����{�b�g��3�����͈ȉ��̂Ƃ���ł��B
������F�f���i�J�����j�B
�l����F�摜�f�[�^����l�̊�Ƃ��̓�����F������B
�����F�J���������Y�̕����ƃt�H�[�J�X��l�̊�ɍ��킹��B
�ȏ�ɏЉ��3�̃��{�b�g�́C�����ł͓����Ȃ��i�ړ����Ȃ��j�̂Ń��{�b�g�炵���Ȃ��Ɗ����܂����C�����3�̃��{�b�g�ɂƂ��ē������Ƃ͕K�v�Ȃ��̂ł��B�w�̉��D��G�A�R��������ɓ������炩�����č���ł��傤�B���{�b�g�͎����̖����͈̔͂Łu�����v�u�l���v�u������v�悢�̂ł��B
���̈Ӗ��ŁC2�����s���{�b�g�Ƃ����͍̂��̂Ƃ���u�l�Ԃ̂܂˂��������v�ȏ�̂��̂ł͂���܂���B�n��𑖂�E�������j���E����ԁC�ǂ���Ƃ��Ă��C�����ӂƂ��鑼�̐����ɂ͂��Ȃ�Ȃ����Ƃ�������炩�ł��B�K���_�����l�^�ł͂Ȃ��C�@�\����Njy�������̂ł�������Ƌ����Ȃ�邩������܂����B�ł��C����2�����s�Ƃ����̂͑傫�ȈӖ��������Ƃ�����̂�������܂���B���̐߂��I���ɂ�����C�F�����2�����s���{�b�g�̏������l���Ă݂܂��傤�B
==================================================================
���i�c�ƎO�@�^�r�j�@���c�M��Y�@�]�����O�@���엲�@�Ζ쌒�p�@���ԐM�v�@�����l�@���C���w����Ċw�ԁ@���{�b�g����u���x���