資料・技術情報
IMUセンサーを活用した位置推定【LP08:センシング回路編】
| お客様に必要なセンシング回路を最適なセンシングデバイスも含めてご提案致します。環境センサーから位置測定、工業に必要なトルクセンシング、圧力センシングまでご提供致します。汎用モジュールと連携した小型の回路基板にもご対応致します。 |
| IMUセンサーを活用した位置推定 IMU センサーを活用した小型携帯回路基板を製作し、GPS を採用出来ない制約環境にて、位置推定を実現致しました。
特徴 ・GPS が採用できない制約環境下の場合、IMU センサーの活用で位置推定を実現しています。 ・回路基板に供給される二次電池の容量考察をSPICE シミュレーションで検証しています。 ・位置推定のアルゴリズムをノイズ除去も含め、GNU Octaveで実現しました。 |
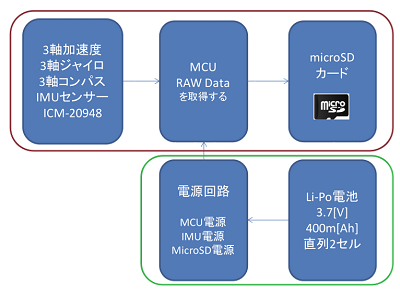 ハードウエアの構成
ハードウエアの構成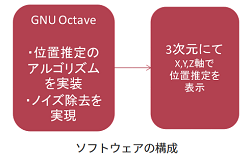
| ■ pdfファイルはこちらからダウンロードしてください。 お見積り・ご相談は無料です。 お気軽にお問合せ下さい。  |