マルツTOP > APPLICATION LAB TOPページ > おすすめ技術記事アーカイブス > 生産現場にコボットを安全に組み込むには
生産現場にコボットを安全に組み込むには
著者 Richard A. Quinnell(リチャード A. クィネル) 氏
Digi-Keyの北米担当編集者 提供
2020-02-06
マルツ掲載日:2020-05-11
現在、小規模な生産ラインにもコスト効率の高い方法で統合できる小型の産業用ロボットが利用できるようになっています。これらの産業用ロボットの利点の1つは、人間のオペレータと協働して、反復的なタスクの負荷を取り除くことです。こうしたタスクは、オペレータを疲れさせ、ミスにつながる可能性があります。問題は、動いている機械のそばで作業する場合、人間の安全に対してリスクがもたらされることです。
協働ロボット(コボット)の安全性を維持する鍵は、関連するリスクを慎重に検討し、潜在的な危険を軽減するようにロボットとその制御システムを構成することです。幸いなことに、現在、安全性の確保へと導いてくれる技術仕様が利用できます。
この記事では、作業環境にコボットを追加することの利点について考察し、その安全に関する懸念事項を明らかにします。また、最近の規制上のガイドラインに加えて、リスク評価とリスク軽減戦略について説明します。次に、生産環境やワークフロー環境に安全に追加できるようにする安全メカニズムが組み込まれたコボットを紹介します。
協働ロボットを追加する理由
主要な製造施設に設置されている産業用ロボットは、生産能力を高めると同時に、コストを削減するという点においてその価値を証明してきました。現在、小型の産業用汎用ロボットが、中小規模の生産にそのような利点を提供しています。
しかし、より大型の産業用ロボットとは異なり、小型ロボットは、単独ではなく、人間のオペレータ(操作者)と連携して動作するように設計されています(図1)。ロボットと人間が作業空間を共有することにより、ロボットによる貴重な生産フロアスペースの使用を最小限にして、コスト効率を高めています。
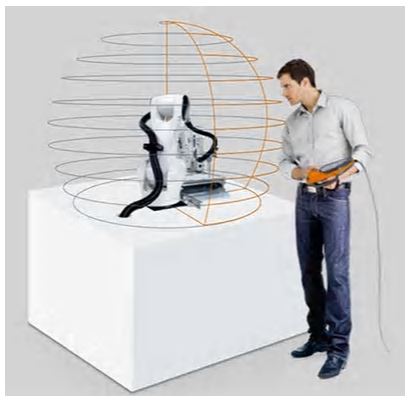
図1:小型産業用ロボットは、単独ではなく、人間のオペレータと連携して動作するように設計されています。(画像提供:KraussMaffei/KUKA Robotics)
すべての電動機械の場合と同じように、これらのコボットは適切に使用しないと傷害を引き起こす可能性があります。そのため、コボットを生産ラインに投入する場合は、オペレータの安全に関する問題を慎重に検討する必要があります。
留意する必要がある要素には、ロボットの動作範囲と動作速度、処理する材料、オペレータが操作する方法と頻度などが含まれます。これらの要素を把握した後、適切な安全性強化機能をシステム設計に組み込むことができます。
米国のOSHA(労働安全衛生局)、カナダのCCOHS、欧州委員会などの組織が規定している規制要件は、コボットの動作安全性について、いくつかの要素の実装を義務付けています。たとえば、OSHA 29連邦規制基準(CFR)1910は、修理作業中に危険なエネルギー源をシステムから排除し(第147項)、操作中に電気ショックが発生しないようにする(第333項)ことを求めています。
こうした規制は、すべての形式の産業機械を対象として制定されており、必ずしも技術に遅れずに対応しているわけではありません。一般的に産業用ロボット、特にコボット特有の規制はほとんどありません。
ただし業界では、産業用ロボット特有の技術規格をいくつか制定することにより、この不足を補っています。これらの規格には、機能面の安全性に関するIEC 61508規格、機械の安全性のための設計に関するISO 12100規格、産業用ロボットの安全性に関するISO 10218-1および10218-2規格が含まれます。
最近では、協働ロボットの安全性に関するISO/TS 15066技術規格が発表されています。これらの規格の一部の項のみがロボティクスシステム設計の要件として定義されています。残りの項は、ロボットと人間の安全なやり取りを確立するための詳細なガイドラインを開発者とオペレータに提供する推奨事項です。
コボットのリスク評価
コボットの安全性の実現は、意図したロボット動作と使用モデルの慎重なリスク評価から始まります。この評価は、ロボット自体だけでなく、アプリケーションや動作環境全体に及びます。
たとえば、エッジが鋭い金属シートを処理するロボティクスシステムでは、段ボール箱を扱うシステムの場合とは異なるリスクが生じます。同様に、グリッパが装備されたロボットのリスク評価は、ドリルやはんだごてを備えたロボットの評価とは異なります。
したがって開発者は、ロボットの動作における潜在的なリスク源を特定するために、システムの動作範囲、ロボットの動作特性、作業空間とワークフロー、その他の類似した要素を完全に把握する必要があります。これらのリスク源には、何らかの傷害を引き起こす可能性のあるロボットと人間の相互作用(意図的か、不注意、または機器の故障によるもの)が含まれます。
リスクを特定したら、各リスクを評価する必要があります。この評価では、次の3つの主要な基準を使用して、それぞれのやり取りのリスクを軽微、低、中、高、重大に分類します。
・潜在的な障害の重大性
・危険に曝される頻度や期間
・危険を回避できる可能性
・危険に曝される頻度や期間
・危険を回避できる可能性
代表的なリスク評価ツリーを図2に示しています。傷害の重大性の範囲は、数日で完治する切り傷や打ち身などの軽傷から、回復不能な傷害や死亡につながる重傷にまで至ります。危険に曝される際の範囲は、低(ときどき)から高(頻繁または継続的)です。回避可能性の範囲は、可能から不可能までです。評価者はこれらの基準を独自の方法で定量化し、特定の状況を反映することができます。

図2:リスクレベルを評価するには、潜在的な傷害の重大性と可能性を分析する必要があります。(画像提供:リチャード A. クィネル氏)
ただし、ISO/TS 15066が業界にもたらした洞察の1つは、ロボットと人間の物理的接触(傷害を起こさない)の定量的定義です。この定義は、物理的接触が発生する可能性が高い、または場合によっては物理的接触が意図されているコボットアプリケーションで特に重要です。この規格では、一時的と準静的の2つのタイプの接触が定義されています(図3)。
ロボットの部品がオペレータの腕に当たることなど、人間がロボットとの接触から直ちに離れることができる状況は、一時的な接触だとみなされます。ロボットのグリッパがオペレータの手をテーブルの上面に押し付けることなど、人間がロボットと固定物の間に挟まれた場合、その接触は準静的だとみなされます。

図3:ロボットと人間の接触(偶発的または予測された)は、一時的と準静的の2つのカテゴリに分類されます。(画像提供:リチャード A. クィネル氏)
コボットアプリケーションにおける接触圧力の限度は、痛みに対する人間の閾値に基づきます。協働ロボットは、意図された接触またはそれ以外の接触が痛みの閾値を下回るように構成する必要があります。接触圧力の制限値は、関与する身体の部分によって異なります。たとえば、頭部が接触する場合、腕の接触よりもはるかに低い痛みの閾値を適用する必要があります。また、準静的な接触には、一時的な接触よりも低い閾値が適用されます。
リスクを特定および評価したら、各リスクに対して、「許容できるレベルのリスクか?」という重要な問いを発する必要があります。ほとんどの場合、軽微なまたは非常に低いリスクは許容できますが、その他のすべてのリスクについては、1つ以上の軽減措置を講じる必要があります。
したがって、適切なリスク軽減措置を選択してから、リスクを再評価することが、ロボットの安全性を実現するための次の手順になります。これらの手順は、すべてのリスクが許容レベルに低下するまで繰り返します。
リスクを軽減する方法
リスクを軽減するいくつかの最も望ましい方法には、ロボット作業空間のプロセスやレイアウトを再設計して、危険を排除したり、人間とロボットのやり取りを制限することにより、危険への暴露を最小限にしたりすることが含まれます。
従来の産業用ロボットアプリケーションでは、人間がロボットの作業空間に入ったときにロボットをシャットダウンするインターロックを備えたケージを使用して、人間をロボットの作業空間から遠ざけることにより、人間とロボットのやり取りを制限していました。ロボットが協働作業空間を人間と共有する必要があるコボットアプリケーションの場合は、他の方法が必要です。
業界では、協働ロボットと人間のやり取りのために、次の主要な4つのアプローチを確立しています。
・安全適合監視停止
・ハンドガイド
・速度と距離の監視
・力と圧力の制限
・ハンドガイド
・速度と距離の監視
・力と圧力の制限
開発者は、アプリケーションに最適なアプローチまたはそれらの組み合わせを決定する必要があります。
安全適合監視停止は、ロボットのエンドエフェクタを脱着したり、作業中に検査を行うなど、特定の条件下でオペレータがロボットのみとやり取りするアプリケーションで適切に機能します。このタイプのやり取りでは、ロボットは、人間の存在を検知するために監視している保護作業空間内で自律的に動作します。
人間のオペレータは、その作業空間に入る前に安全適合停止を起動させます。オペレータが作業空間内に留まっている間、ロボットの電源は入っていますが、ロボットは静止したままになります。オペレータが作業空間を出ると、ロボットは、自律動作を自動的に再開します。誰かが安全適合停止を起動させずに、監視対象の作業空間に入ると、システムは保護停止を起動し、システムの電源がシャットダウンされます。
ハンドガイドのシナリオでは、オペレータはロボットの作業空間に入る前に安全適合停止を起動させ、その後、ハンドガイドメカニズムを使用して、ロボットのアームの位置を変えてから、ロボットの次の動作を始動させます。
ハンドガイドメカニズムには、単にロボットのアームを握って操作することや、ハンドヘルド制御デバイスを使用して、ロボットの動きを操作することなどが含まれる場合があります。ロボットのリフトアシストなどのアプリケーションでは、ハンドガイドされた協働作業が活用されます。
速度と距離の監視は、オペレータとロボットが同じ作業空間を頻繁に共有していて、オペレータがその作業空間内を自由に移動できる状況で便利です。このシナリオでは、システムによって、ロボットから人間までの距離が監視され、最小限の保護分離距離が常に維持されます(図4)。
人間とロボットの間に安全な分離距離があり、接触する可能性がない場合、ロボットは最高速度で自由に動作できます。分離距離が縮まると、ロボットの動作は継続しますが、動作が低速になるため、ロボットを完全に停止するために必要な手間が省けます。分離距離が縮まりすぎると、ロボットは安全適合停止の状態になり、傷害を引き起こす可能性が排除されます。

図4:速度と距離の監視では、安全な動作が定義されているロボット周辺のゾーンが明確になっています。(画像提供:リチャード A. クィネル氏)
このアプローチで各段階の距離を定義するには、ロボティクスシステムの動作機能を理解する必要があります。監視機能により保護空間に近づく人間が検知されると、人間がその空間に到達する前にロボティクスメカニズムが完全に停止するようにシステムを設計する必要があります。
適切な分離距離を計算するために、開発者は次の要素を知る必要があります。
・ロボットと人間が動く速度
・侵入の可能性を検知するシステムの応答時間
・ロボットが命令を受信してから停止するまでの時間
・侵入の可能性を検知するシステムの応答時間
・ロボットが命令を受信してから停止するまでの時間
速度と距離の監視を使用するアプローチでは、作業空間のレイアウトによって、安全ゾーンの定義と監視を簡単にすることができます。1つ例を挙げると、レイアウトによって、固有の安全ゾーンが作成されます(図5)。
作業台は、ロボットが最高速度で自由に動けるロボット動作空間から人間を分離します。ロボットは、作業台の両端にある協働領域に入ると速度を自動的に落とすことができます。協働領域は、準静的な接触の機会を制限するために配置されています。速度を落とすと、一時的な接触圧力が低下し、危険を回避するチャンスが最大化されるため、この領域のリスクが最小限になります。
機械的に停止すると、ロボティクスメカニズムが人間の動作領域に絶対に入らなくなるため、リスクが排除されます。こうした配置では、人間の侵入に対して、ロボットの動作空間の監視が最小限で済み、システムの高い安全性が確保されます。

図5:作業空間設計により固有の安全ゾーンを作成できます。(画像提供:リチャード A. クィネル氏)
力と圧力の制限を使用するアプローチは、人間とロボットの接触が発生する可能性が高いアプリケーションで特に便利です。このアプローチを活用する場合、ロボットが接触を検出して応答できるようにするために、異常な圧力がメカニズムにかかったときに、ロボットがその圧力を感知できる必要があります。
また、ロボットは、鋭いエッジや挟まれる箇所をなくしたり、表面パッドを組み込んだり、動作速度を制限したりすることなどによって、潜在的な接触圧力を最小化するように設計する必要があります。
アプリケーションは、発生する可能性がある接触のタイプ(一時的または準静的)や関与する可能性がある身体の部分を慎重に評価しながら、接触が低頻度および回避可能になるように設計する必要があります。また、アプリケーションの設計では、準静的な接触の機会を最小限にし、頭部、首、または喉の接触を完全に防止することを目指す必要があります。
ロボティクスシステムの安全機能
協働アプリケーション用のロボットを選択する開発者は、上記の1つ以上の軽減方法をどのように実装するかを念頭に置く必要があります。安全措置をどの程度簡単に実装できるかを判定する場合、ロボットの物理的な設計に加えて、ロボットを制御するシステムの評価が必要になります。ただし、通常、ロボットベンダは、安全性がすでに確保されたシステムを開発しています。
たとえば、KUKAのAgilusロボットキットファミリには、ハンドガイドされた制御用のsmartPADタッチオペレータパネルと統合安全機能を備えたKR C4システムコントローラが含まれています。パッケージには、オプションのKUKA.SafeOperationソフトウェアが用意されています。このキットには、540mm(KR 3 R540)、900mm(KR 6 R900-2)、1100mm(KR 10 R1100-2)など、さまざまな到達範囲を備えたアームが用意されています(図6)。

図6:KUKAのAgilus KR 3などの小型産業用ロボットは、安全を主要な考慮事項として設計されており、セットアップ中に業界規格に準拠した場合、人間のオペレータと作業空間を安全に共有して協働することができます。(画像提供:Kuka Robotics)
3つすべてのロボットは、エネルギーを吸収するパッドの下に丸みを帯びた表面を備えており、接触の圧力を最小限にするように設計されています。挟まれる危険を排除するために、関節部分にはカバーが取り付けられています。
また、これらのロボットは、開発者がロボットの動作空間を物理的に制限できるようにするために、主要な動作軸に対して調節可能な機械的な停止機能を提供します。キットに含まれるsmartPADは、ハンドガイドされた動作が要求されるアプリケーションへの対応を容易にします(図7)。

図7:KUKAのロボットキットには、必要に応じて、ハンドガイドされた制御を可能にするsmartPadタッチオペレータが含まれています。(画像提供:KUKA Robotics)
KR C4コントローラには、安全適合停止と緊急停止に加えて、業界標準の外部センサを監視する機能を実装して、安全対策を確立するためのルーチンが含まれた統合安全ソフトウェアが付属しています。また、このソフトウェアは、ロボットの位置や動作軸を中心とした動きを内部的に監視できます。
KUKA.SafeOperationソフトウェアを使用すると、固定動作セルを定義できるため、この内部監視機能が強化されます。固定動作セルとは、3~10個の角がある凸多角形であり、ロボットは、この多角形の外部で動作できません(図8)。また、開発者は、デカルト座標または軸固有の座標を使用して、そのセル内で最大16個の監視空間を定義できます。

図8:開発者はKUKA.SafeOperationソフトウェアを使用して、位置関連の安全監視を改善したり、動作領域やモデルのエンドエフェクタツールを定義したりできます。(画像提供:KUKA Robotics)
SafeOperationソフトウェアでは、位置関連の安全監視をさらに改善するために、ロボットの取り付けフランジでエンドエフェクタツールを最大6つのユーザー定義領域のコレクションとしてモデル化できるようにしています。
これらの領域は、ロボットのアームとともに移動します。動作中にアームまたはツール領域が監視空間に入る、または監視空間の外に出ると、ソフトウェアが反応します。可能な反応には、アラーム信号の送信、ロボット動作の低速化、安全停止の実施などが含まれます。したがって、開発者は、ロボットの動作範囲内のあらゆる位置でロボットがどのように動作するかを簡単に制御できます。
こうした機能はリスク軽減スキームの実装を簡単にしますが、機能自体は、人間とロボットの安全なやり取りを保証しません。特に協働アプリケーションでロボティクスシステムを生産ワークフローに統合することを試みている開発者は、リスクを評価して、リスク軽減措置を講じる必要があります。
これらの評価と軽減措置の多くは、アプリケーションに固有のものになります。この取り組みには、メーカーのすべてのガイドラインと制限に従い、ユーザーを適切にトレーニングし、必要に応じて、監視システムおよびバリアを実装することが含まれます。
まとめ
ロボットとコボットは製造ワークフローやその他のワークフローの一部としてますます受け入れられるようになっていますが、産業用オートメーションの開発者が考慮する必要のある潜在的な危険をもたらします。
ロボットの安全性のために新しく策定された規格は役立ちますが、安全を主要な考慮事項として基礎から構築されたロボティクスシステムの可用性により、ワークフローへのロボットの統合が大幅に簡単かつ安全になります。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、Digi-Key Electronicsの意見、信念および視点またはDigi-Key Electronicsの公式な方針を必ずしも反映するものではありません。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、Digi-Key Electronicsの意見、信念および視点またはDigi-Key Electronicsの公式な方針を必ずしも反映するものではありません。
このページのコンテンツはDigi-Key社より提供されています。
英文でのオリジナルのコンテンツはDigi-Keyサイトでご確認いただけます。
Digi-Key社の全製品は 1個からマルツオンラインで購入できます


ODM、OEM、EMSで定期購入や量産をご検討のお客様へ【価格交渉OK】
毎月一定額をご購入予定のお客様や量産部品としてご検討されているお客様には、マルツ特別価格にてDigi-Key社製品を供給いたします。
条件に応じて、マルツオンライン表示価格よりもお安い価格をご提示できる場合がございます。
是非一度、マルツエレックにお見積もりをご用命ください。