ToFセンサを使用した距離測定とジェスチャ認識の基礎
初期の近接センサ

図1:Polaroid SONAR OneStep SX-70カメラには、オートフォーカス距離測定用の超音波トランスデューサ(カメラの上部にある大きな金色の円)が組み込まれていました。(画像提供:Wikipedia)
SONARの超音波センサは非常に成功し、Polaroidはセンサのみに特化したビジネスを立ち上げ、現在でもPolaroid超音波センサ オートフォーカスセンサの残影を見ることができます。たとえば、安価なSparkFun SEN-13959 HRC-SR04超音波距離測定モジュールは、送信トランスデューサと受信トランスデューサを別個に備える距離センサです(図2)。このセンサは、Arduino開発ボードで直接駆動される設計になっています。センサの測定範囲は2~400cmで、最小解像度3mmの非接触近接測定を行うことができるように指定されています。

図2:SparkFunのSEN-13959超音波距離測定モジュールでは、40kHzの反射パルスを使用して距離を感知します。(画像提供:SparkFun)

図3:Sharp GP2Y0A41SK0F赤外線距離測定センサユニットは、3cm~40cmの範囲で対象物を検出できます。(画像提供:Sharp Microelectronics)
ただし、ビデオゲーム業界のおかげで、ToFセンサテクノロジは大幅に安くなりました。現在、ToFセンサが使用されている最も有名な製品は、MicrosoftのKinectゲームコントローラです(図4)。第1世代のMicrosoft Kinectは、2010年後半にMicrosoftのXbox 360の周辺機器として導入されました。このコントローラは、ToF距離センシングを使用して、ロボットの周囲環境の3次元マップを生成できたため、ロボット製作者の間で非常に人気がありました。

図4:MicrosoftのXbox 360ビデオゲームコンソール用のMicrosoft Kinectコントローラでは、ToFセンシングを使用してその周囲環境の3次元マップを作成します。(画像提供:Wikipedia)
たとえば、STMicroelectronicsは、近接測定用のミニチュアToFセンサ製品を数世代提供しています。これらのセンサは、赤外線垂直キャビティ、面発光レーザー(VCSEL)、および単一光子アバランシェフォトダイオード(SPAD)の配列など、最先端の基礎テクノロジに基づいています。このToFセンサ製品の3つのセンサが、VL53L0CX、VL53L1CX、およびVL6180Xです。これらはすべて距離を測定しますが、これら3つのセンサはそれぞれ機能が異なります。
第1世代のVL6180X ToFセンサの距離モードは1つで、数ミリメートルから100ミリメートルまでの近接を測定します(図5)。このセンサのサイズは、4.8 x 2.8 x 1.0mmで、視野角は42度です。また、内蔵の周囲光センサで、周囲光の変化を補償できます。

図5:STMicroelectronicsの第1世代VL6180Xセンサの最大距離は、100ミリメートルです。(画像提供:STMicroelectronics)
第2世代VL53L0CX ToFセンサの屋内距離は50~1,200mmで、白い対象物に対して機能します(図6)。このセンサのサイズは4.4 x 2.4 x 1.0mmで、視野角は25度です。周囲光により、センサを屋外で使用する場合、最大距離は600~800mmに縮小します。
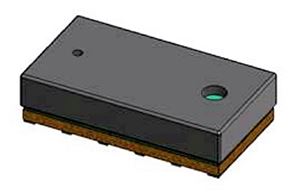
図6:STMicroelectronicsの第2世代VL53L0CXセンサの最大距離は、1,200mmです。(画像提供:STMicroelectronics)
第3世代のVL53L1CX ToFセンサには、3つの距離モードがあります(図7)。周囲光なしの白い対象物に対する短距離、中距離、および長距離モードの最大距離は、それぞれ1,360mm、2,900mm、3,600mmです。強力な周囲光がある場合、短距離、中距離、長距離モードの最大距離は、それぞれ1,350mm、760mm、730mmです。直観に反し、周囲光が強力な場合、短距離モードの測定距離が最長になります。
VL53L1CXのサイズは4.9 x 2.5 x 1.56mmで、最大視野角は27度です(以下で説明するように、このセンサの視野角は設定可能で、狭くすることができます)。

図7:STMicroelectronicsの第3世代VL53L1CXセンサの最大距離は、ほぼ4mです。(画像提供:STMicroelectronics)

図8:初期のセンサと同様に、STMicroelectronicsの第3世代VL53L1CXセンサは、シンプルなI2C接続を使用してホストプロセッサに接続します。(画像提供:STMicroelectronics)
これらすべてのToFセンサは、基本的に1次元です。これらのセンサは、視野角内にある対象物の近接性を報告します。複数の対象物が視野角内にある場合、これらのセンサは最も近い対象物までの距離を報告します。単一のセンサでは、片手によるジェスチャの方向を検出できませんが、次のようなシンプルな4つのジェスチャを検出するために使用できます。
2. 2回タップ
3. 1回スワイプ(手でセンサの視野角を左右に動かす)
4. 2回スワイプ
さらに、視野角を選択して絞り込むことで、第3世代VL53L1CX近接センサからより多くの情報を取得することができます。これを行うには、I2Cインターフェース経由でセンサに送信されたコマンドを使用して、センサの配列内の個々のSPADを切り替えます。VL53L1CX近接センサのSPAD配列は、16 x 16配列の256フォトダイオードで構成されています。配列の正方形または長方形部分は、アクティブにする必要がある配列内のSPADを囲むボックスの2つの角を指定するソフトウェアコマンドを使ってアクティブにすることができます。アクティブな要素の数を削減すると、センサの視野角が削減されて、センサの関心領域が絞り込まれます。唯一の要件は、4 x 4フォトダイオード配列として、少なくとも16個のSPADをアクティブにすることですが、これよりも大きい配列も使用できます。
ToFセンサを使用した設計
設計をすぐに始めることができるように、VL53L1CX近接センサには評価キットP-NUCLEO-53L1A1が付属しています。これには、STMicroelectronicsのマイクロコントローラに基づくSTM32F401RE Nucleo評価ボードと、マイクロコントローラボード上にマウントされ、2つのVL53L1CXブレークアウトボード(これもキットに含まれます)を受け入れるX-NUCLEO-53L1A1拡張ボードも付属しています(図9)。
図9:STMicroelectronics P-NUCLEO-53L1A1評価キットに付属しているセンサのブレークアウトボードには、ボードに直接取り付けられるVL53L1CX ToF近接センサが1つ含まれています。このボードは、プラグ式ブレークアウトボードに、さらに2つのVL53L1CXセンサを受け入れます。(画像提供:STMicroelectronics)
これらの拡張モジュールは個々のセンサに固有で、STMicroelectronicsから無料で直接ダウンロードできます。モジュールは非常に小さいため、これらのSTMicroelectronics ToFセンサは、設計者が計画しているほぼどの場所にも適合できます。創造力をかきたてるいくつかの用途例を示します。
・タッチレスペーパータオルとソープディスペンサ
・タッチレストイレと男性用便器フラッシャ
・タッチレスシンク給水栓
・ロボット電気掃除機用の壁沿いセンサおよび物体回避センサ
・ラップトップコンピュータおよびモニタ用の低コストオペレータ存在検出器
・小売売店用のシンプルな存在検出およびジェスチャ検出
・自動販売機の物理在庫管理
・自動販売機の硬貨計数
・セルフレジ店舗の在庫を自動的に管理するスマートシェルフ
・ドローン用地上近接検出
・屋内ドローン用天井近接検出
2次元ToFセンサ、ステレオカメラ、ニューラルネットワークに基づく近接検出器とは異なり、これらの統合型STMicroelectronics ToF近接センサのコストは比較的安く、幅広い価格帯で販売するために設計されたさまざまな最終製品に組み込むことができます。
結論
近接センシングには光学式や超音波などさまざまなテクノロジを利用でき、これらのテクノロジに基づく優れたソリューションが多数あります。これらの近接検出の中で最も新しいテクノロジの1つがToF(Time-of-Flight)です。ToFでは、光子がセンサを離れ、対象物まで移動し、センサに戻ってくるために必要なラウンドトリップ時間を使用して対象物までの距離を測定します。
赤外線エミッタとレシーバおよび光子の移動時間のナノ秒未満の時間測定に必要な電気回路が組み込まれた統合型センサの出現により、このテクノロジをコスト効率良く使用できるようになりました。関連の開発キットを使って、実験を行ったりプロトタイピングを迅速化することもできます。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、Digi-Key Electronicsの意見、信念および視点またはDigi-Key Electronicsの公式な方針を必ずしも反映するものではありません。
このページのコンテンツはDigi-Key社より提供されています。
英文でのオリジナルのコンテンツはDigi-Keyサイトでご確認いただけます。
Digi-Key社の全製品は 1個からマルツオンラインで購入できます


ODM、OEM、EMSで定期購入や量産をご検討のお客様へ【価格交渉OK】
毎月一定額をご購入予定のお客様や、量産部品としてご検討されているお客様には、マルツ特別価格にてDigi-Key社製品を供給いたします。
条件に応じて、マルツオンライン表示価格よりもお安い価格をご提示できる場合がございます。
是非一度、マルツエレックにお見積もりをご用命ください。