マルツTOP > APPLICATION LAB TOPページ > おすすめ技術記事アーカイブス > ロータリエンコーダを使用して機械的回転をデジタル信号に素早く変換する方法
ロータリエンコーダを使用して機械的回転をデジタル信号に素早く変換する方法
デジタル時代において、モータのメカニカルシャフトや機器の回転ノブの回転測定は、素早く効率的に実行する必要があります。ポテンショメータやロータリスイッチなどのアナログ的な方法は、回転運動を直接デジタル化するロータリエンコーダに置き換えられています。ただし、設計者はさまざまなエンコーダタイプの違いを認識し、デジタル出力を正確に解釈できるようにする必要があります。
この記事では、ロータリエンコーダの役割とその仕組みについて説明します。次に、信号の解釈方法を説明し、最後にエンコーダソリューションと実際の応用例を紹介します。
ロータリエンコーダの役割
ロータリエンコーダは、メカニカルシャフトの回転を測定するセンサの1つです。シャフトがモータに搭載されている場合、角度位置または回転速度を読み取ります。ロータリエンコーダは、機器や家電製品のフロントパネルにあるダイヤル、ノブ、または他の電子制御の角度位置を読み取ることができ、ポテンショメータやロータリスイッチの代わりとなります。
家電製品のタイマ制御を考えてみましょう。アナログ的な手法が活用されていたときは、可変抵抗器やポテンショメータを使用して、タイマ制御の位置をセンスしていました。今日のマイクロプロセッサベースの設計では、ロータリエンコーダにより生成されたデジタル入力を使用するほうが効率的です。
エンコーダを制御システムで使用することで、制御コマンドに応じて機械的部分が正常に動作しているというフィードバックを提供することもできます。自動車やロボットデバイスの制御システムで、エンコーダは制御マイクロプロセッサに必要なセンシングを提供します。シングルターンポテンショメータのような以前のソリューションは、シャフトの回転のすべてをセンスすることはできません。一方、ロータリエンコーダは、中断することなく回転をすべてセンスできます。
ロータリエンコーダは、これらの機械的変位を電気信号に変換します。次に、この電気信号はプロセッサに送信されて、処理されます。エンコーダの電気出力に基づいて、回転方向、角度位置、および回転速度が導き出されます。ロータリエンコーダのデジタル出力の処理は、ポテンショメータでの処理よりも簡単に行うことができます。
ロータリエンコーダの仕組み
エンコーダには主に、インクリメンタルエンコーダと絶対エンコーダの2つのタイプがあります。インクリメンタルエンコーダは、角変位の変化を読み取ります。一方、絶対エンコーダは、符号化されたシャフトの絶対角度を読み取ります。この2つのエンコーダには、光学、機械、磁気の3つの一般的な技術が使用されます。
光エンコーダでは、透明なセグメントと不透明なセグメントがあるディスクが使用されており、特定のエリアを光が通過します。ディスク(図1)を挟んでLEDとフォトダイオードがあり、フォトダイオードはディスクを通過する光を検出し、ディスクの透明なセグメントと不透明なセグメントのパターンに応じてパルス波形を出力します。

図1:インクリメンタル光ディスクおよび絶対光ディスクの例。インクリメンタルディスクは、位相差が90°の2つの矩形波信号を生成します。絶対ディスクは、バイナリ符号化データを出力します。(画像提供:Digi-Key Electronics)
図1の絶対ディスクには、ディスクの各セグメントに一意のバイナリコードを提供する4つの出力があります(表1、合計で16個)。バイナリコードの代替となるのはグレーコードです。これは、隣接したバイナリワードがシングルビットの遷移だけしか異ならないバイナリコードです。

表1:4ビットの絶対エンコーダの16個のバイナリ状態。(表提供:Digi-Key Electronics)
インクリメンタルディスクにより生成されたパターンは、位相差が90°の2つの矩形波で構成され、直角位相出力と呼ばれます。これは、1列のパターンと2個の光電センサを90°位相シフトと同じ間隔で配置しても実現できます。
一般的に、直角位相インクリメンタルエンコーダの出力は「A」または「B」と呼ばれます。このエンコーダには、インデックスパルスと呼ばれる3つ目の出力(1回転につき1回のパルス)が含まれる場合もあります。これにより,既知の物理リファレンスが提供されます。インデックスパルスを直角位相出力と組み合わせることにより、絶対シャフトの方向を計算することができます。
90°位相シフトの2つの出力を得ることにより、角回転だけでなく回転方向もセンスすることができます(図2)。

図2: 直角位相信号間の位相関係によりエンコーダディスクの回転方向がわかります。(画像提供:Digi-Key Electronics)
エンコーダシャフトが時計回りに回転すると、A波形がB波形の先になり、回転方向が反時計回りに変更されると、信号Bが信号Aの先になります。
2つの直角位相信号により、サイクルごとに4つの状態に分解することができます。1サイクル内の状態は、A=1とB=0、A=1とB=1、A=0とB=1、A=0とB=0です。これは、直角位相出力エンコーダの角分解能は、1回転あたりの定格パルス数(PPR)の角分解能の4倍であることを意味します。
光エンコーダの直角位相出力をオシロスコープで観察して測定すると、出力間の位相関係がわかります(図3)。A信号は上部トレースに表示され、B信号は下部トレースに表示されます。オシロスコープの位相パラメータP1を設定して、A信号とB信号間の位相差を測定します。2つの信号間の平均位相差は90.4°です。

図3:光エンコーダの1回転あたり512パルスの直角位相出力は、A信号出力とB信号出力間の位相関係を示します。(画像提供:Digi-Key Electronics)
これらの数値に基づくと、このエンコーダの512PPRは0.7度のベース分解能を提供することになります。A/Bの状態を解釈することにより、0.175°を分解することができます。
光エンコーダには、すべてのエンコーダタイプの中で最高の分解能を提供できるという利点があります。光エンコーダにはさまざまな価格のものがあるため、低コストのローエンドアプリケーションに適しています。マイナス面はサイズの大きさです。
機械的エンコーダは、光エンコーダで使用されるパターンと同じ同心リングを含む回転ディスクを使用します。このリングには、導電領域と絶縁領域のパターンがあります。静的ワイパーコンタクトが回転ディスク上をスライドし、各リングと接触することにより、スイッチとして機能します。コンタクトがディスク面全体をワイプする際、導電領域をワイプするとコンタクトが開き、絶縁領域をワイプするとコンタクトが閉じます。このような方法で、各リングでデジタルパターンが生成されます。
機械的エンコーダで発生する可能性のある問題の1つは、接点バウンスによるノイズです。ローパスフィルタや、バウンスノイズが治まった後に出力状態を確認するソフトウェアを使用することにより、このノイズを除去することができます。
一般的に、機械的エンコーダには最も低コストのエンコーダタイプが使われます。ポテンショメータに代わりに、電子フロントパネルのユーザーインターフェースデバイスとして使用されています。
磁気ベースのロータリエンコーダは、円形の多極磁石を使用します。交互にN極とS極が配置されており、ホール効果または磁気抵抗センサによりセンスされ、磁石の回転時に直角位相電気出力を生成します。磁気エンコーダは、光エンコーダと同様に非接触です。また、機械的コンタクトエンコーダよりも高速かつ長期間の動作が可能です。
ロータリエンコーダの使用
ロータリエンコーダは、その電気機械的性質により、機械デバイスまたはユーザーとのインターフェースが必要になります。エンコーダが電子デバイス上の制御インターフェースとして使用される場合、ソリッドシャフトを使用します。また、通常はパネル実装ブッシングを使用して、関連ハードウェアとともに制御パネルに実装されます。
設計者は、戻り止めなどのオプションを選択して、エンコーダの回転時に機械的な「クリック音」を発生させることができます。これにより、エンコーダシャフトが動作中であることを示すタクタイルフィードバックをユーザーに提供します。設計者は、エンコーダシャフトを押すことで、作動するモーメンタリコンタクトスイッチを選択することもできます。
モータやサーボなどの回転機械に実装するように意図されたエンコーダには、中空シャフトまたはブラインドシャフトがあります(図4)。
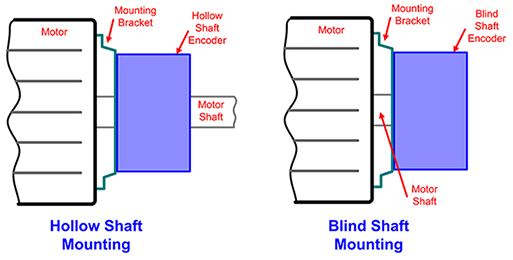
図4:中空シャフトまたはブラインドシャフトで構成されたエンコーダは、モータや他の電気機械に実装されます。(画像提供:Digi-Key Electronics)
中空シャフトエンコーダは、モータのシャフトまたは類似の機械デバイスに実装されます。これにより、エンコーダは監視対象のデバイスに対して同心円状に実装され、非対称または角度のずれが発生する可能性が排除されます。ブラインドシャフトは、中空部分が浅い中空シャフトで、モータシャフトの端にエンコーダを実装するのに使用されます。
エンコーダの選択とアプリケーション
ロータリエンコーダは、アプリケーション要件、環境、およびコスト制約に応じて選択します。
CTS Electronic Componentsの291V1022F832ABは、5Vの電源で動作し、8PPRの角分解能を備えた光インクリメンタルエンコーダです(図5)。291シリーズは、4~64PPRのPPR分解能範囲をサポートしており、シャフトのタイプや長さ、戻り止め、内蔵スイッチをオプションで選択できます。このエンコーダの定格回転寿命は、最大300万サイクルです。

図5:パネル実装制御として使用される291V1022F832ABと一般的なネジ式ブッシング、ロックワッシャ、ロックナット。(画像提供:CTS)
CTS 291シリーズ 光エンコーダは、医療および実験室機器、通信、産業、HVAC、輸送、セキュリティ、オーディオ、家庭用エンターテイメント機器などの機器制御アプリケーションに最適です。
BournsのEMS22Q51-D28-LT4は、5Vまたは3.3Vの電源で動作し、32PPR~256PPRの角分解能を備えたインクリメンタル磁気エンコーダです。このデバイスは、32~256PPRの角分解能を備える非接触エンコーダであるEMS22Qシリーズに属します。このデバイスでは以前のエンコーダと同様に、さまざまなシャフトやブッシング構成を使用できますが、定格回転寿命は5000万サイクルです。このエンコーダは、極端な温度、湿度、粒子汚染などの過酷な産業環境下での使用に最適です。
また、多くのエンコーダと同様に、デバイスの接続や使用が簡単です(図6)。

図6:EMS22Q51-D28-LT4のピン詳細(図の左側)とブロック図からは、256PPRのインクリメンタル磁気非接触エンコーダをマイクロコントローラに簡単に接続できることがわかります。(画像提供:Digi-Key Electronics)
EMS22Qシリーズには、6個のピンがあります。電源とグランド用に各1個、マイクロコントローラまたはマイクロプロセッサに接続するアクティブローのチップセレクト用に1個、インデックスピン用に1個、データピン(AおよびB)用に2個のピンが割り当てられています。図7は、直角位相出力の結果を示しています。

図7:EMS22Qは、32~256のPPR範囲で直角位相出力を生成します。(画像提供: Bourns Inc.)
低コストアプリケーションや趣味用のアプリケーションに使用するデバイスを設計する場合は、TT ElectronicsのEN11-HSM1AF15 20PPRエンコーダなどの機械的エンコーダが適しています。このエンコーダは、15または20PPRの角分解能、さまざまなシャフトやブッシング長さ、オプションのスイッチ、および戻り止め構成を選択できるEN11シリーズの製品です。このエンコーダは、5Vの電源で動作し、光エンコーダの約10分の1の価格ながら、3万サイクルの回転寿命があります。
結論
ロータリエンコーダは、フロントパネル制御、ロボットアーム、または回転モータシャフトなどの角回転を素早く効率的にセンスしてデジタル化するというニーズを満たします。インクリメンタルまたは絶対エンコーダは、マイクロプロセッサやマイクロコントローラへの必要なインターフェースを提供し、電気機械システムコンポーネントのセンシングと制御を実現します。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、Digi-Key Electronicsの意見、信念および視点またはDigi-Key Electronicsの公式な方針を必ずしも反映するものではありません。
このページのコンテンツはDigi-Key社より提供されています。
英文でのオリジナルのコンテンツはDigi-Keyサイトでご確認いただけます。
Digi-Key社の全製品は 1個からマルツオンラインで購入できます


ODM、OEM、EMSで定期購入や量産をご検討のお客様へ【価格交渉OK】
毎月一定額をご購入予定のお客様や、量産部品としてご検討されているお客様には、マルツ特別価格にてDigi-Key社製品を供給いたします。
条件に応じて、マルツオンライン表示価格よりもお安い価格をご提示できる場合がございます。
是非一度、マルツエレックにお見積もりをご用命ください。