BLDCモータを転流する最も効果的な方法は何ですか?
著者 Jason Kelly, Electromechanical Design Engineer, CUI Inc.
2017-02-16
マルツ掲載日:2018-09-24
ブラシレスDCモータ
ブラシレス直流電気モータ(BLDCモータ)は、外部モータコントローラを介してDC電源によって駆動される電気的に転流されたモータです。 ブラシ付きのものとは異なり、BLDCモータは転流を実現するために外部コントローラに依存しています。 簡単に言えば、転流はモーションを生成するためにモータ位相での電流を切り替えるプロセスです。 ブラシ付きモータは、このプロセスを回転ごとに2回達成するための物理的なブラシを備えていますが、BLDCモータはブラシを持っておらず、従ってこの名前が与えられています。 その設計の性質上、転流のための極対はいくつでも構いません。
BLDCモータは、従来のブラシ付きモータに比べて大きな利点を提供します。 これらは一般的に効率を15〜20%向上させ、物理的に摩耗するブラシがないので、メンテナンスをほとんど必要とせず、すべての定格速度でフラットなトルクカーブを実現します。 BLDCモータは新しい発明ではありませんが、複雑な制御回路とフィードバック回路が必要なため、普及が遅れていました。 しかし、最近の半導体技術の進歩、永久磁石の改善や、効率の向上に対する要求が高まることにより、多くの用途でブラシ付きモータがBLDCモータに置き換えられています。 BLDCモータは、白物家電、自動車、航空宇宙、民生、医療、産業オートメーション機器や、計装など、多くの業界でニッチな領域を見出しています。
業界がより多くのアプリケーションでBLDCモータを必要とする方向に進むにつれ、多くの技術者がこの技術に切り替える必要があります。 モータ設計の基本は依然として適用されますが、外部制御回路を追加することで、設計上の考慮事項が新たに追加されました。 設計問題のリストの上位にあるのは、モータ転流のフィードバックを得る方法です。
モータ転流
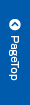
BLDCモータのフィードバックオプションを掘り下げる前に、なぜそれらが必要なのかを理解することが重要です。 BLDCモータは、単相、2相、および3相構成になっています。最も一般的な構成は3相です。 位相の数は 固定子の巻線の数に一致し、一方、回転子の極は用途に応じて任意の数の対であり得ます。 BLDCモータの回転子は回転する固定子の極の影響を受けるので、3つのモータ位相を効果的に駆動するためには固定子の極位置を追跡しなければなりません。 従って、モータコントローラが、3つのモータ位相に6ステップの転流パターンを生成するために使用されます。 これらの6ステップ、すなわち転流位相は、回転子の永久磁石がモータシャフトを回転させるために電磁場を移動します。
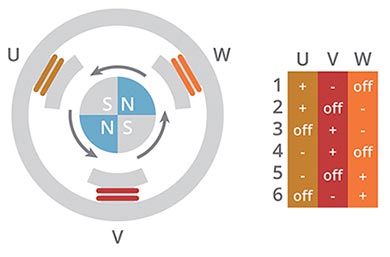
図1:BLDCモータ転流用の6ステップパターン
この標準モータ転流シーケンスを使用すると、モータコントローラは、高周波パルス幅変調(PWM)信号を使用して、モータによって観測される平均電圧を効果的に低減し、モータ速度を変化させることができます。 この設定はまた、DC電圧源がモータの定格電圧よりもはるかに大きい場合であっても、広範囲のモータに1つの電圧源を使用できるようにすることにより、設計の自由度を大きくすることができます。 このシステムがブラシ技術よりも効率的な利点を維持するためには、モータとコントローラの間に非常に厳しい制御ループが必要です。 これがフィードバック技術が重要になる場所です。コントローラがモータの正確な制御を維持するためには、常に回転子に対する固定子の正確な位置を知る必要があります。 予想される位置および実際の位置のずれまたは位相のずれが、望ましくない動作および性能の低下を招く可能性があります。 BLDCモータの転流のために、このフィードバックを達成する多くの方法がありますが、最も一般的なものはホール効果センサ、エンコーダ、またはリゾルバです。 さらに、アプリケーションによっては、センサレス転流技術に依存しているものもあります。
位置フィードバック
ブラシレスモータの開始以来、ホール効果センサは転流フィードバックのための主力となってきました。 3相制御では、3つのセンサのみが必要で、単価が非常に低いため、純粋なBOMコストの観点から転流を実現する最も経済的なオプションとなります。 ホールセンサは、モータの固定子に埋め込まれ、回転子の位置を検出し、モータを駆動するために3相ブリッジ内のトランジスタを切り替えるために使用されます。 3つのホール効果センサの出力は、通常、U、V、およびWチャネルとして表記されています。 ホールセンサはBLDCモータを転流するための効果的なソリューションですが、BLDCシステムの半分のニーズにしか対応していません。
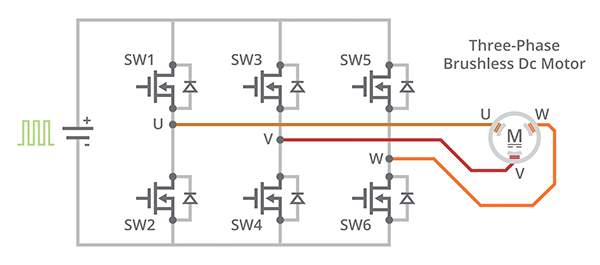
図2:3相ブリッジドライバ回路
ホール効果センサはコントローラがBLDCモータを駆動することを可能にしますが、残念なことにその制御は速度と方向に制限されます。 3相モータの場合、ホール効果センサは各電気サイクル内で角度位置のみを提供することができます。 極対数が増加するにつれて、機械的回転あたりの電気サイクル数が増加し、BLDCの使用がより一般的になるにつれて、正確な位置検出の必要性が増大します。 堅牢で完全な解決策を確保するために、BLDCシステムはリアルタイムの位置情報を提供しなければならないので、コントローラは速度と方向だけでなく、移動距離と角度位置も追跡できます。
より厳しい位置情報の必要性に対処するための最も一般的な解決策は、増分ロータリーエンコーダをBLDCモータに追加することでした。 同じ制御フィードバックループシステム内のホール効果センサに加えて、増分エンコーダが追加されることがよくあります。 ホールセンサはモータの転流に使用され、エンコーダは位置、回転、速度、および方向をはるかに正確に追跡するために使用されます。 ホールセンサは各ホール状態の変化時にのみ新しい位置情報を提供するので、それらの精度は電気回転あたり6つの状態に制限されます。2極モータの場合、機械的な1回転につき6つの状態にしかなりません。 何千ものPPR(1回転あたりのパルス数)で分解能を提供する増分エンコーダと比較して、4倍の状態変化にデコードできるため、なぜ両方の必要性があるのかが明らかになります。
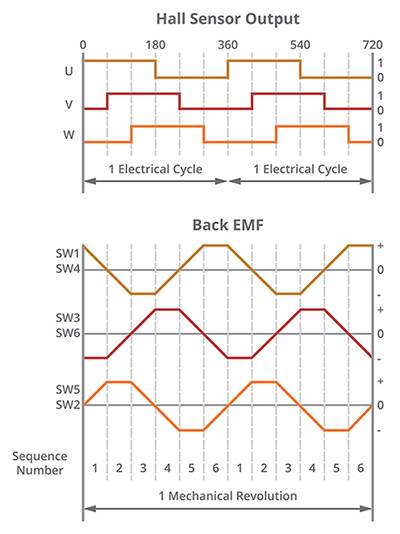
図3:6ステップのホール効果出力と台形モータ位相
しかし、モータメーカーは、ホール効果センサと増分エンコーダの両方をモータに搭載する必要があるため、多くのエンコーダメーカーは、転流エンコーダと呼ばれることが多い転流出力を備えた増分エンコーダに移行しています。 これらのエンコーダは、ほとんどのBLDCモータドライバで必要とされる標準のU、V、W転流信号とともに、従来の直交AチャネルとBチャネル(時には1回転あたり1回のインデックスパルスチャネルZ)を提供するように設計されています。 これにより、モータ設計者は、ホール効果センサと増分エンコーダの両方をインストールするための不要なステップを省くことができます。
このアプローチの利点は説得力がありますが、この方法には大きなトレードオフがあります。 前述のように、BLDCモータを効率的に転流するためには、回転子位置と固定子位置を知っていなければなりません。 これは、転流エンコーダのU/V/WチャネルがBLDCモータの位相に適切に整合されるように注意する必要があることを意味します。
光ディスク上に固定パターンを有する光学式エンコーダおよび手動で配置しなければならないホール効果センサの場合、BLDCモータの正しい整合を達成するプロセスは、反復的で時間がかかります。 この方法は、第2のモータおよびオシロスコープを含む追加の装置が関与します。 光学式エンコーダまたは1組のホール効果センサを整列させるには、BLDCモータを第2のモータでバックドライブする必要があります。次に、モータが第2のモータによって等速で回転されるにつれ、オシロスコープを使用して、3つのモータ位相の逆起電力(逆起電力または逆EMFとしても知られている)を監視します。 エンコーダまたはホールセンサから得られるU/V/W信号は、オシロスコープに表示された逆EMF波形と照合する必要があります。 U/V/Wチャンネルと逆EMF波形にバラツキがある場合は、調整が必要です。 このプロセスは、1モーターにつき20分以上かかることがあり、広範な実験施設が必要であり、BLDCモーターを使用する際の不満の大きな原因です。 光転流エンコーダは、1つの技術のみを導入する負担を集約しますが、光転流エンコーダを実装することの欠点は汎用性の欠如です。 光エンコーダは光ディスクに固定パターンを使用するため、注文する前にモーターの極数、直交分解能、モータ軸のサイズを把握しておく必要があります。
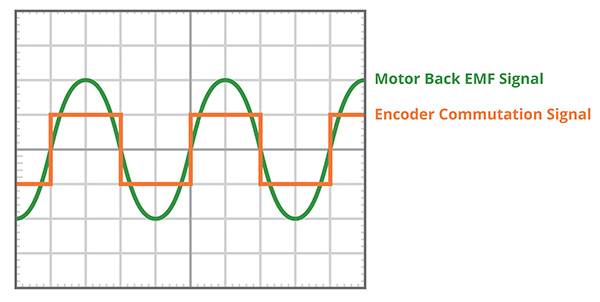
図4:転流チャンネルとモータ位相の望ましい整合
容量性転流エンコーダ
CUI Inc.は、AMTファミリの製品で使用されている特許取得済みの容量性技術をベースにした強化型転流エンコーダを提供することで、両方の問題に対処しています。 光学式エンコーダは、非常に小さいLEDを使用して、特定の間隔でノッチ付きのディスクに光を透過させて出力パターンを生成します。 AMTエンコーダも同様の方法で記述することができますが、LEDを介して光を送信する代わりに電界が送信されます。 光ディスクの代わりに、電界を変調する正弦波パターンの金属トレースを含むPCB回転子があります。 変調された信号の受信端は、送信機に戻され、独自のASICを介して元の信号と比較されます。 この技術は、その信頼性と精度で知られているバーニアデジタルキャリパと同じ原理を使用しています。
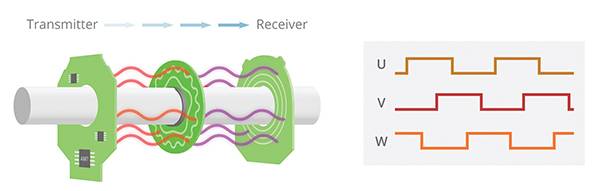
図5:容量性エンコーダ動作
AMT31シリーズ転流エンコーダは、増分出力A/B/Zと転流出力U/V/Wを提供します。 容量性ASICとオンボードMCUを含む設計で、エンコーダはその出力をデジタルで生成します。 これは、ユーザーがボタンを1回押すだけでエンコーダのゼロ位置をデジタル的に設定できるため、重要です。 BLDCモータを希望の位相状態にロックし、AMT One Touch Zero™モジュールまたはAMT Viewpoint™プログラミングGUIを使用してAMT31エンコーダをゼロにするだけです。 これにより、モーターをバックドライブしたり、オシロスコープで出力信号を見る必要がなくなり、組み立てプロセスから20分を効果的に短縮できます。
容量性技術のおかげで、直交分解能と転流出力を動的に調整することができます。 ユーザーはAMT31エンコーダをAMT Viewpoint GUIに接続し、20の直交分解能(最大4096PPR)と7つの標準極対オプション(最大20極)のリストから選択し、「プログラム」を押すだけです。 これは開発に利点をもたらし、エンジニアがプロトタイプの変更をすばやく簡単に行うことを可能にし、単一の最小在庫管理単位(SKU)をさまざまな分解能とBLDC極数のモータ制御に使用できるようにすることで、生産サプライチェーン管理も支援します。 複数の分解能と極対数をサポートする各ユニットに加えて、エンコーダハウジングは、組み立てが簡単で、一般的に使用されるモータ軸直径に適合する複数の取り付けオプションと複数のスリーブサイズを提供するように設計されています。
AMT Viewpoint GUIはまた、AMT31シリーズ エンコーダに前例のないレベルの設計サポートをもたらします。 AMT Viewpointに接続すると、AMT31エンコーダの診断データをダウンロードして、フィールドでの障害や停止時間を回避することができます。
結論
高精度のタイトな制御ループにより、BLDCは多くの分野で優れた性能を発揮します。 精度の向上は、消費電力の削減、精度の向上、およびBLDC動作に対するエンドユーザー制御の強化を意味します。 BLDCモータは、現在、外科用ロボット、ドライバーレス自動車、組立ラインの自動化などの多様なアプリケーションに実装されており、まもなく想像されていない他の多くの分野でその地位を築くでしょう。 BLDCモータの市場が拡大するにつれて、低コストで高精度の位置検出フィードバックを提供する、堅牢で効率的なモータに対する要件は変わりません。 BLDCモータと組み合わせることで、AMT31シリーズ エンコーダは、開発と製造を効率化しながらも設置時の貴重な時間を節約することができます。 多用途性、プログラミング能力、秒単位でのゼロ設定、そしてAMT Viewpoint GUIとの互換性を備えたAMT31エンコーダは、急速に成長するBLDC市場のニーズを満たすために十分に調整されています。
このページのコンテンツはDigi-Key社より提供されています。
英文でのオリジナルのコンテンツはDigi-Keyサイトでご確認いただけます。
Digi-Key社全製品 1個からマルツで購入できます


定期購入・量産をご検討のODM、OEM、EMSのお客様へ【価格交渉OK】
毎月一定額をご購入されるお客様、量産部品として検討されるお客様に向けては、マルツ特別価格にてDigi-Key社製品を供給します。
条件に応じてマルツオンライン表示価格よりもお安い価格をご提示できる場合がございます。
是非一度、マルツに見積もりをご用命くださいませ。