柔軟なEV充電システムを迅速かつ効率的に実装する方法
著者 Stephen Evanczuk 氏
Digi-Keyの北米担当編集者 の提供
2021-12-15
マルツ掲載日:2022-04-11
E-モビリティへの移行は、利用者の家庭や職場での適切な充電システムに加えて、公共サービスステーションの電気自動車(EV)充電インフラをどの程度利用できるかどうかにかかっています。EV充電システムの中核となる設計要件の大部分は同じですが、各タイプのシステムには特殊な需要があり、通信プラットフォームからコンプライアンス要件に至るまで、地域ごとに異なる要素が複雑に絡み合っています。
したがって、充電インフラの設計者にとっての課題は、コストと市場投入までの時間のバランスを取りながら、最終用途と地域的要件に可能な限り幅広く対応するために、設計に十分な柔軟性を持たせてコア要件を満たすことです。
この記事では、公共充電ステーションの設計要件の多様性について解説します。次に、それらの要件を満たす設計を開始するのに適した、NXP Semiconductorsの柔軟なソリューションプラットフォームを紹介します。
多様な設計課題に対応
EVへの移行を加速させるためには、一般的にEV充電システムとして知られる、効率的な電気自動車用電源装置(EVSE)をすぐに利用できるようにする必要があります。局地的な運転ニーズには、家庭やオフィスでの充電用として自動車に内蔵されているオンボードAC/DC充電器で対応できますが、このような充電システムではEV走行距離への不安を解消できず、そのことがEVの普及を妨げ続けています。
長距離E-モビリティの普及は、内蔵のAC/DC充電器よりもはるかにEV高速充電ができる公共のEV用DC充電システムが提供されるかどうかにかかっています。同時に、これらのさまざまなEV充電システムは、安全、セキュリティ、プライバシーに関する数多くの規格や規制を遵守する必要があります。
EV充電システムソリューションの開発者にとって、それぞれの用途に応じた効果的なソリューションを求められることは、大きなチャンスであると同時に大きな技術的課題に直面することでもあります。それらの課題の中で、開発者は、各アプリケーションの特定の要件を満たしながら、要求される性能と効率を実現できる幅広い設計で、一連の機能を提供する必要があります。
こうしたニーズを満たすには、すべてのEV充電システム設計の根幹となる基本アーキテクチャをそれぞれの要件に適合させる必要があります。
EV充電システムの基本アーキテクチャの要件適合
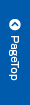
EV充電システムには、具体的な対象アプリケーションが何であるかにかかわらず、電力供給フロントエンドと電源管理バックエンドコントローラの2つの主要なサブシステムがあり、それらが分離境界で隔てられています(図1)。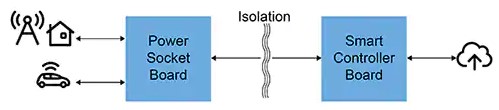
図1:EV充電システムの基本アーキテクチャには、電源ソケットインターフェースとコントローラの別々のサブシステムが含まれ、分離境界で隔てられています。(画像提供:NXP Semiconductors)
車両とエネルギー源側のフロントエンドでは、電源ソケットインターフェースサブシステムが車両への電力供給を管理します。分離境界の反対側では、コントローラサブシステムが安全性や通信などの高レベル機能を処理します。
これらのサブシステムの実装は、通常、メトロロジー、制御、機能的安全性、セキュリティ、通信など、各アプリケーションに関連する特定の要件を満たすためのいくつかの基本的な構成ブロックによって決まります。
各構成ブロックは、EV充電システム設計全体に重要な機能を提供します。メトロロジーユニットは、安全なエネルギー伝送と、課金目的の正確な耐タンパエネルギー測定を保証する必要があります。制御ユニットは、下流のエネルギー伝送と上流のデータ伝送に必要なさまざまなプロトコルを確実に実行し、機能的安全性とセキュリティに基づきながら、クラウドベースのリソースとの通信に使用する安全な決済や通信プロトコルに関する地域固有の要件に対応します。
かつては、基本的なEV充電アーキテクチャ設計をそれぞれの要件に適合させるために、汎用デバイスを幅広く組み込んだカスタム設計を一般的に使用して、必要な各構成ブロックを実装する必要がありました。NXPのEV充電用ソリューションファミリは、その効果的な代替手段と言えます。開発者は、既製の構成ブロックを組み合わせることで、幅広い対象アプリケーションにおいてEV充電システム設計を迅速に実現できます。
EV充電システムフロントエンドの実装
NXPのEV充電用ソリューションは、EV充電システム設計のような要求の厳しいアプリケーションに必要な性能と機能を実現するために特別に設計された数多くのプロセッサファミリを中心に展開されています。これらのプロセッサファミリのうち、NXPのKinetis KM3xシリーズ マイクロコントローラ(MCU)は、高精度の確かな電力供給測定を実現するために設計されています。
Arm 32ビットCortex M0+コアをベースにしたKinetis KM3x MCUは、測定、セキュリティ、通信、システムサポート用の幅広い機能ブロックセットと、オンチップフラッシュおよびスタティックランダムアクセスメモリ(SRAM)を内蔵しています(図2)。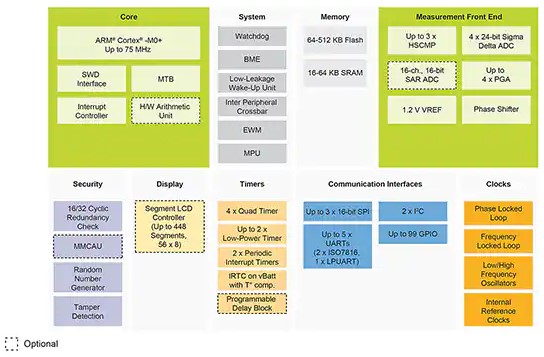
図2:Kinetis KM3xシリーズは、高精度の確かな電力供給測定を実装するために必要な機能ブロックの完全なセットを内蔵しています。(画像提供:NXP Semiconductors)
メトロロジーの実装を簡素化するために、KM35x MCU計測フロントエンドは、高精度シグマデルタA/Dコンバータ(ADC)、複数の逐次比較レジスタ(SAR)ADC、最大4つのプログラマブルゲインアンプ(PGA)、高速アナログコンパレータ(HSCMP)、位相補償論理ブロック、低温ドリフトを備えた高精度内部基準電源(VREF)を内蔵しています。
メトロロジーユニットの整合性を保護するために、オンチップセキュリティ機能は、タイムスタンプによるアクティブおよびパッシブタンパー検出をサポートしています。これらのオンチップブロックは、外部センサやリレーなどの周辺モジュールと組み合わせて使用することで、EV充電システムの電源ソケットフロントエンド向けの高度なメトロロジーサブシステムを迅速に実装するために必要なすべての機能を提供します(図3)。
図3:Kinetis KM MCUを使用すれば、わずかな外付け部品を追加するだけでEV電源ソケットサブシステムを実装できます。(画像提供:NXP Semiconductors)
EV充電システムコントローラの実装
前述したように、EV充電システムコントローラは、すべてのシステムに必要なさまざまな機能を調整します。このサブシステムでは、充電システムを正確に制御するために必要なリアルタイム性能と、多様なプロトコルをサポートするために必要な処理スループットを両立し、設計フットプリントとコストを最小化するプロセッサが必要とされています。
Arm Cortex-M7コアをベースにしたNXPのi.MX RTシリーズ クロスオーバープロセッサは、組み込みマイクロコントローラのリアルタイム機能とアプリケーションプロセッサレベルの性能を提供します。600MHzの動作周波数と充実した周辺モジュールにより、i.MX RT1064などのi.MX RTプロセッサは、低レイテンシのリアルタイム応答への要求を満たすことができます。
同時に、大容量オンチップメモリ、外部メモリコントローラ、グラフィックスサブシステム、および複数のコネクティビティインターフェースなどの機能により、アプリケーションの要求にも応えています(図4)。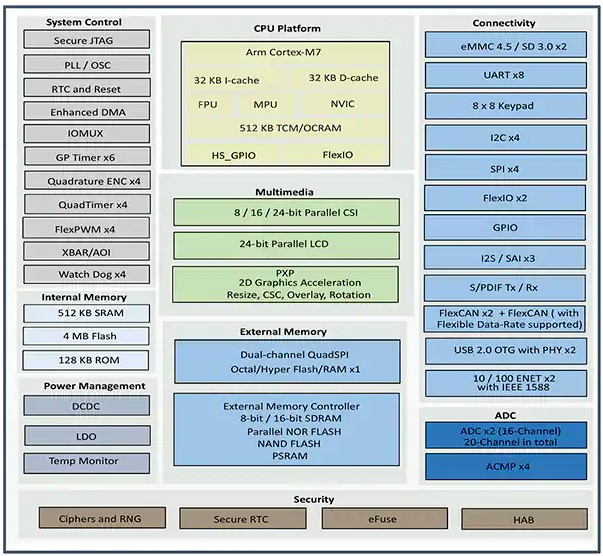
図4:i.MX RT1064クロスオーバープロセッサは、リアルタイム実行とアプリケーションプロセッサレベルの性能の両方を実現するために設計されたArm Cortex-M7プロセッササブシステムと、周辺モジュールおよびメモリが組み合わされています。(画像提供:NXP Semiconductors)
EV充電システムの設計には、リアルタイム実行や性能面での重要な要件を満たすことに加え、タンパー検出、電源接続や決済方法の認証など、多面的なセキュリティの確保が必要です。
データ保護、セキュアブート、セキュアデバッグのために、開発者は、高保証ブート、ハードウェア暗号、バス暗号化、セキュアな不揮発性ストレージ、セキュアなJoint Test Action Group(JTAG)コントローラなど、i.MX RTプロセッサに内蔵されたセキュリティ機能を利用することができます。
EV充電システムコントローラのセキュリティをさらに強化するには、NXPのEdgeLock SE050セキュアエレメントを搭載してi.MX RTプロセッサのセキュリティ機能を補完する設計が一般的です。
SE050は、エンドツーエンドのライフサイクルセキュリティを実現するために設計されており、一般的な各種暗号アルゴリズム、トラステッドプラットフォームモジュール(TPM)機能、セキュアなバストランザクション、セキュアなストレージのためのハードウェアベースのセキュリティアクセラレータを提供します。
このデバイスを使用して実行環境のルートオブトラスト(RoT)を提供することで、開発者は認証、セキュアオンボーディング、整合性保護、証明などの重要な操作を安全に行うことができます。
i.MX RTプロセッサとEdgeLock SE05xデバイスを使用すれば、開発者はわずかな部品を追加するだけで、高性能なリアルタイムオペレーティングシステム(RTOS)を実行するように設計されたコントローラサブシステムを実装できます(図5)。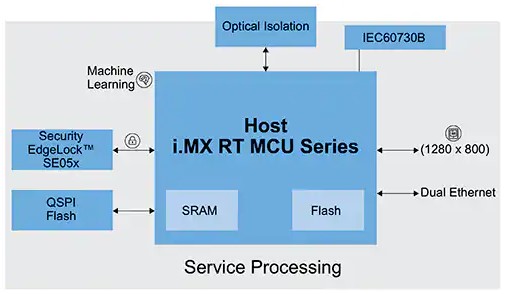
図5:i.MX RT MCUは、その統合された機能と性能により、EV充電システム用のコントローラサブシステムの設計を簡素化します。(画像提供:NXP Semiconductors)
多様なEV充電システムアプリケーションに対応する柔軟なソリューション
上記の電源サブシステムとコントローラサブシステムに、決済や通信などのオプションブロックを組み合わせることで、開発者は最大7kWの単相EV充電システムを短期間で実装することができます(図6)。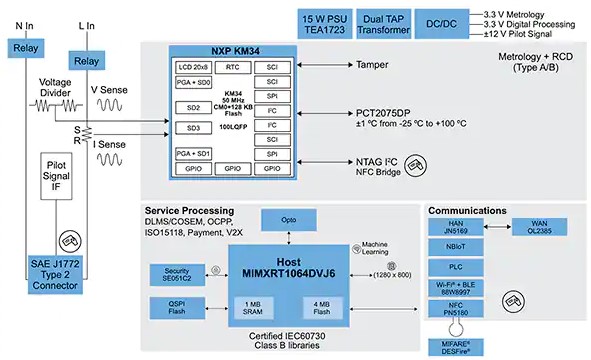
図6:KM3 MCUとi.MX RTクロスオーバープロセッサを組み合わせて使用することで、EV充電システムの効率的なハードウェア基盤が実現します。(画像提供:NXP Semiconductors)
アナログフロントエンドに比較的小さな変更を加えるだけで、この同じ設計を最大22kWの三相EV充電システムに拡張することができます(図7)。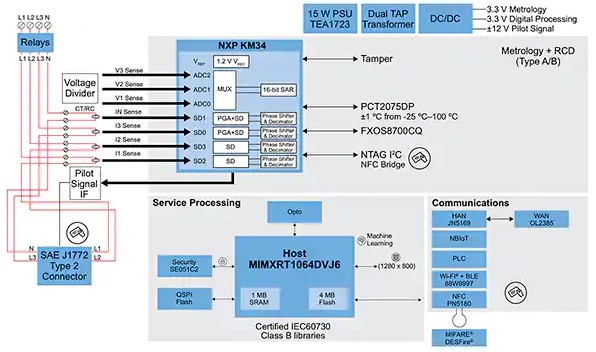
図7:開発者は、KM3 MCUとi.MX RTクロスオーバープロセッサをベースとした設計を迅速に要件に適合させ、さまざまなアプリケーションをサポートすることができます。(画像提供:NXP Semiconductors)
KM3xとi.MX RTデバイスの組み合わせは多くの用途に対応できますが、EV充電システムのアプリケーションによっては、開発者が設計の別の面を最適化する必要があるかもしれません。
たとえば、オンボード充電器よりも充電時間を短縮することを目的とした家庭用充電器では、コストとフットプリントを最適化するソリューションが必要になります。このようなアプリケーションでは、NXPのLPC55S69などのコスト効率のよいMCUを使用して、低価格のエントリレベルコントローラを実装することができます。
対照的に、公共サービスステーション向けの商用EVSE充電器では、アプリケーションの高速処理とリアルタイム性能がより厳しく要求されます。これらは、400~1000Vで動作し、350kW以上の充電レベルを実現するバッテリストレージシステムを安全に制御するために必要です。ここでは、アプリケーションレベルのソフトウェアとリアルタイムソフトウェアの両方を実行できることが、性能と機能性にとって非常に重要です。
このようなシステムで、NXPのi.MX 8Mなどのプロセッサを使用することで、これらの複雑な設計に必要なLinuxベースのアプリケーション処理とRTOS対応のリアルタイム性能の両方を提供できる充電ソリューションをより簡単に実装できます(図8)。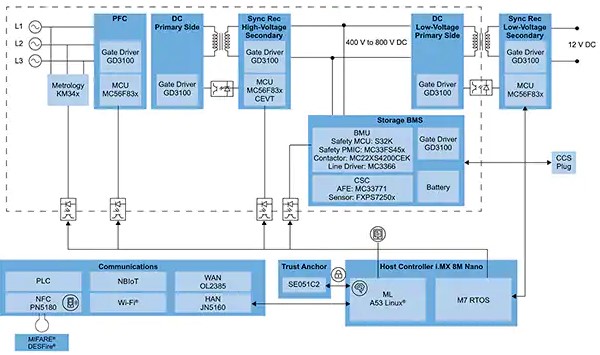
図8:超高速EV充電など、より複雑なアプリケーションの場合、i.MX 8Mプロセッサなどの高性能プロセッサを使用して基本的なEV充電アーキテクチャを拡張し、より複雑なコントローラ要件をサポートすることができます。(画像提供:NXP Semiconductors)
クラウド接続型EV充電システムの迅速な実装
Kinetis KM3x、i.MX RT、LPC55S69、i.MX 8MなどのNXPプロセッサは、さまざまなEV充電システムアプリケーションの特定の要件を満たすための柔軟なプラットフォームを提供します。しかし、より複雑なアプリケーションの場合、ハードウェア基盤の展開が遅れると、エンドツーエンドのEV充電システムアプリケーションの開発に大きな遅延が生じる可能性があります。
このような遅延を回避するために、NXPは、前述のデバイスをベースにした一連のボードと評価キットを使用して、迅速な開発プロセスを提供しています。たとえば、NXPのTWR-KM34Z75Mモジュールは、Kinetis MKM34Z256VLQ7計測MCUと充実したサポート部品を組み合わせた完全なメトロロジープラットフォームを提供します。
同様に、NXPのi.MX RT1064評価キットは、MIMXRT1064DVL6プロセッサと256MビットのSDRAM、512Mビットのフラッシュ、64MビットのクワッドSPI(QSPI)フラッシュを4層基板ですべて組み合わせ、Arduinoインターフェースなどの幅広い周辺コネクタセットを完備しています。
さらに、NXPのOM-SE050ARDボードではEdgeLockSE050にすぐにアクセスでき、NXPのPNEV5180BM評価ボードではドロップインのNFCフロントエンド開発ボードが提供されます。
NXPのメトロロジー用TWR-KM34Z75Mボード、制御機能用i.MX RT1064、OM-SE050ARDボードとPNEV5180Bボードを組み合わせることにより、EV充電システムアプリケーション構築用のフル機能ハードウェアプラットフォームを迅速に実現できます(図9)。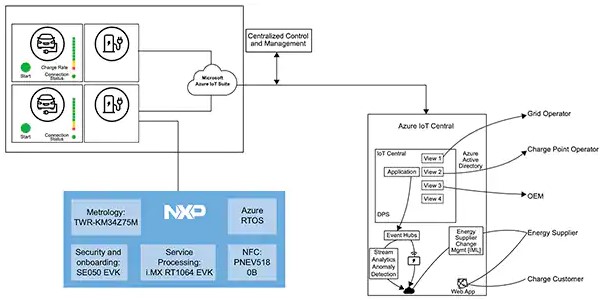
図9:NXPのボードおよび評価キットをMicrosoft Azureなどの利用可能なクラウドサービスと併用することにより、完全なエンドツーエンドのEV充電ソリューションを迅速に実装できます。(画像提供:NXP Semiconductors)
NXPのボードレベルのソリューションをMicrosoft Azureクラウドサービスと組み合わせることで、開発者は完全なエンドツーエンドのEV充電システムソリューションを迅速に試作し、より専門的なアプリケーションの設計の基礎としてプラットフォームを使用することができます。
まとめ
EV充電システムをすぐに利用できることが、E-モビリティ推進の重要な要因です。しかし、家庭、オフィス、公共サービスステーションで必要とされるさまざまなソリューションをコスト効率良く実装することは、依然として高い壁となっています。
NXP Semiconductorsの専用デバイスとボードソリューションのプラットフォームを使用すれば、あらゆるEV充電アプリケーションに対応する性能と、新たな要件に適合できる柔軟性を備えた設計を迅速に実装することができるでしょう。
免責条項:このウェブサイト上で、さまざまな著者および/またはフォーラム参加者によって表明された意見、信念や視点は、Digi-Key Electronicsの意見、信念および視点またはDigi-Key Electronicsの公式な方針を必ずしも反映するものではありません。
このページのコンテンツはDigi-Key社より提供されています。
英文でのオリジナルのコンテンツはDigi-Keyサイトでご確認いただけます。
Digi-Key社の全製品は 1個からマルツオンラインで購入できます


ODM、OEM、EMSで定期購入や量産をご検討のお客様へ【価格交渉OK】
毎月一定額をご購入予定のお客様や量産部品としてご検討されているお客様には、マルツ特別価格にてDigi-Key社製品を供給いたします。
条件に応じて、マルツオンライン表示価格よりもお安い価格をご提示できる場合がございます。
是非一度、マルツエレックにお見積もりをご用命ください。